高压输电线路是电力远距离输电的主要方式, 输电线路负责输送电力的重任, 是电力系统中重要的一环。它是国家基础设施建设和社会发展的“大动脉”, 扮演着非常重要的角色。
以下为本篇论文正文:
摘 要:定期对架空线路进行故障的检测与修复, 是供电可靠、稳定运行的基本保证。针对巡检机器人的作业环境与作业内容, 设计了一种基于STC89C52单片机并结合PC104的巡检机器人。该机器人沿着高压线路行驶, 通过其所携带的温度传感器、摄像机、GPS、无线通讯等设备对线路进行检测与数据传输。通过在实验室内模拟环境进行调试, 基本实现了预期要求。
关键词:架空线路; 巡检机器人; 控制系统;
Abstract: It is the basic guarantee of reliable and stable operation of power supply to detect and repair the fault of overhead line regularly. In view of the working environment and contents of the inspection robot, a kind of inspection robot based on STC89 C52 MCU and PC104 is designed. The robot runs along the high-voltage line and detects and transmits data through the temperature sensor, camera, GPS, wireless communication and other devices it carries. Through debugging in the laboratory simulation environment, the expected requirements are basically achieved.
Keyword: overhead line; inspection robot; control system;
高压输电线路是电力远距离输电的主要方式, 输电线路负责输送电力的重任, 是电力系统中重要的一环。它是国家基础设施建设和社会发展的“大动脉”, 扮演着非常重要的角色。由于输电线路、杆塔、绝缘子串、线路金具等长期暴露在外部环境中, 受恶劣天气影响、电气闪络、机械张力与材料老化等多种原因而产生线路断股、开裂、腐蚀等损伤, 如不及时检修将严重影响电力线路的正常运行, 甚至造成严重的停电事故和人身安全隐患。
国外对于巡检机器人的研究始于20世纪80年代末, 加拿大、日本等国家先后开展了这方面的研究, 最具有代表性的是加拿大魁北克水电研究院的Montambault等人研制了巡检机器人“Line Scout”, Line Scout可以通过地面遥控操作, 其技术比较先进, 功能比较齐全。该机器人不仅可以巡检线路, 还可以完成导线修补、螺栓紧固等相对简单的线路维护作业[1].国内对高压输电线路巡检机器人的研究起步较晚。武汉大学吴功平教授率先在国内开展高压输电线路巡线机器人的研究, 成功研制了沿单导线及地线行驶的两种自主巡检机器人。近年来, 山东科技大学研制出一款高压线巡检机器人样机, 该机器人设置有三个机械臂, 采用基于规则的专家控制系统来控制机器人在高压输电线上的爬行[2].
1、 系统组成
巡检机器人由巡检机器人本体和地面基站组成。巡检机器人的控制系统总体结构如图1所示。
巡检机器人的本体是整个系统的核心部分, 主要包括巡检机器人的机械部分、巡检部分、驱动部分、通讯部分、电源部分等。地面基站主要由PC机组成, 与巡检机器人本体间通过蓝牙连接, 实时接收机器人巡检图像与数据、发送控制指令等。本文主要对巡检机器人的本体控制部分进行了设计。
图1控制系统总体结构
机械部分:巡检机器人以输电线路的地线为工作路径, 在线路上移动来进行巡检任务, 要求机器人能够在线路上以稳定的速度移动。轮式滚动的行走方式可以确保其行走的稳定性, 也可保证一定的速度。故采用双轮滚动的行走机构。如图2所示。
巡检部分:由DS18B20温度传感器、摄像机构成, 通过PC104嵌入式工控机对摄像机的控制, 可实现对输电线路、杆塔、绝缘子等的可见光图像的巡查。
驱动部分:通过STC89C52单片机对驱动模块进行驱动, 由于架空地线带有弧度且机器人需携带大量传感器, 对于电机的扭矩有一定的要求, 主要选用功率大小为25~40W的无刷直流电机[3].
图2 巡检机器人行走机构
通讯部分:由于在实验室进行调试, 选用了蓝牙模块, 在实际应用中蓝牙模块的通讯距离短, 传输速度慢, 可更换为无线局域网 (WLAN) 或3G通信系统。
电源部分:巡检机器人工作在高空, 其电源应为移动电源, 并且要求电源重量轻、体积小、容量大。对比多种电源, 发现采用锂电池作为电源非常适合。
2、 关键技术
2.1、 机构设计
由于巡检机器人在架空地线运行, 采用的轮子为带有凹槽式的轮子, 这样可使轮与线接触紧密, 稳定性也较好。轮胎与电机相连, 电机与轮胎的连接处放置DS18B20温度传感器, 因与线路最接近, 易固定, 可实时了解到机器人的状态信息。两个直流无刷电机通过轮轴由直杆固定在下方的机构平台上。机构平台主要用于搭载STC89C52单片机与PC104中控机及各种传感器、电源等。机构平台的前方放置有GY-VL53l0X激光测距传感器, 主要用于检测前方是否有障碍物, 是否让机器人停止。机构平台的后方放置有蓝牙模块, 可将数据送回给上位机, 通过连线将各模块与STC89C52单片机和PC104中控机相连, 实现通讯。机构平台的下方主要放置摄像头, 可控制摄像头的方向对输电线路、杆塔、绝缘子等的可见光图像进行巡查。如图3所示。
图3 机构设计
S1-机构平台;S2-GY-VL53l0X激光测距传感器;S3-DS18B20温度传感器;S4-摄像头;S5-蓝牙模块
2.2、 控制系统的设计
巡检机器人本体的控制系统主要由两部分组成, 其一是基于STC89C52单片机的控制部分, 其二是以PC104中控机为主的控制部分。
2.2.1、 STC89C52单片机控制模块
由于STC89C52单片机内存小, CPU运行速度慢, 基于STC89C52单片机的控制部分主要以简单功能为主, 包括对周围环境温度的测量、与前方障碍物距离测量以及驱动模块等。
(1) 温度传感模块
DS18B20是常用的温度传感器, 具有体积小, 抗干扰能力强, 精度高的特点。其测温范围为-55℃~+125℃, 固有测温误差1%[4].DS18B20温度传感器由STC89C52单片机对其进行控制, 温度可实时显示, 其数据可通过蓝牙传输至地面基站, 可通过PC端的STC-ISP软件接受蓝牙传输数据, 并由MATLAB绘制出温度变化曲线。如温度有异常, 超过某预定的值时, 可进行报警提醒。DS18B20电路图如图4.
图4 DS18B20电路图
(2) 电机驱动模块
巡检机器人电机主要由L298N电机驱动芯片控制, 以来实现对机器人的行进与停止控制。L298N由STC89C52单片机进行控制, L298N内部主要由H桥驱动电路组成, 可同时驱动两个电机。电机A的转速和方向可以分别从IN1、IN2输入PWM信号进行控制, 电机B的转速和方向可以分别从IN3、IN4输入PWM信号进行控制。L298N驱动模块电路图如图5.
图5 L298N驱动模块电路图
(3) 距离检测模块
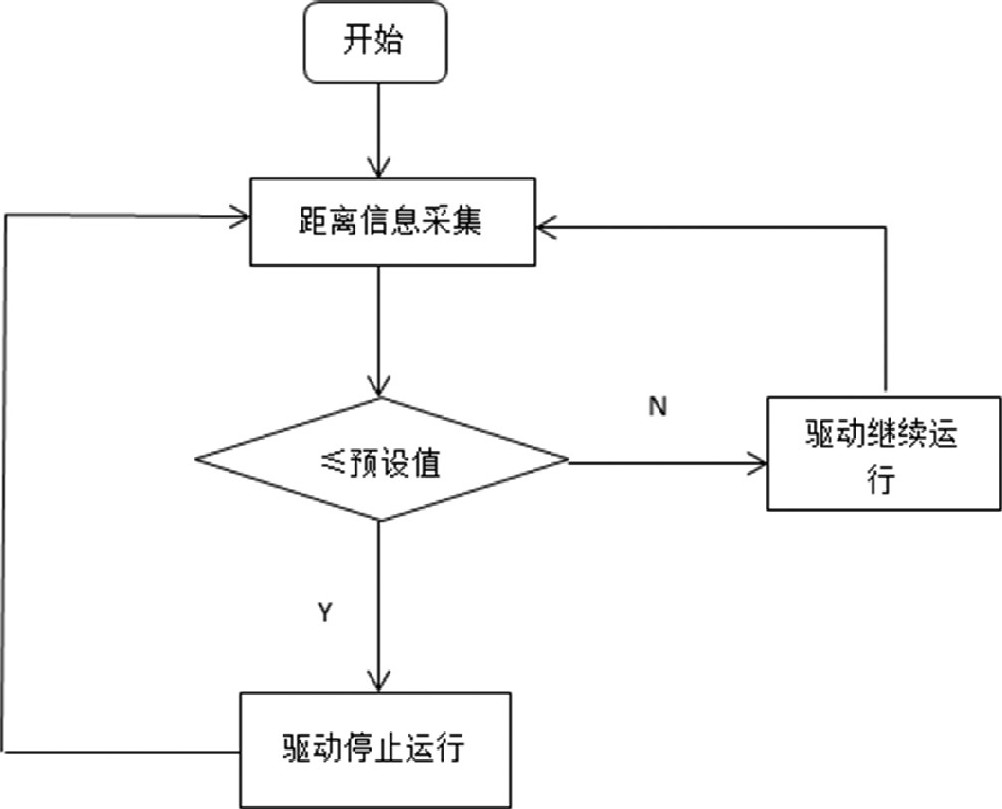
在机器人行进方向的前方安装有GY-VL53l0X激光测距传感器, 由STC89C52单片机对其进行控制, 如测得前方距离小于预定值时, STC89C52单片机控制电机停止, 在物体之前停下来。流程图如图6所示。
图6 运行流程图
2.2.2 PC104中控机
PC104中控机采用紧凑的、自我堆栈式的模块。PC104相较于STC89C52单片机来说, 其结构更加紧凑, 容易拓展, 运算速度更快, 但其中断速度响应慢[5].基于PC104中控机的控制部分主要功能有图像处理、GPS定位以及数据传输。以上几个功能对于CPU的运算速度都有一定的要求, 选用以PC104中控机为控制部分较为合理。
图7 蓝牙模块
(1) 蓝牙模块
利用HC-06蓝牙模块与PC机相连, 可将实时数据传输至PC机。蓝牙模块的设置相对简单, 无需使用线缆连接上下位机, 实现无线串口连接。因蓝牙传输距离有限, 考虑到实际使用中, 机器人与地面基站相距较远, 无法达到数据传输。可更换为无线局域网 (WLAN) 或3G通信系统, 这两种方式传输距离更远、传输速度更快。蓝牙模块如图7.
(2) GPS定位模块
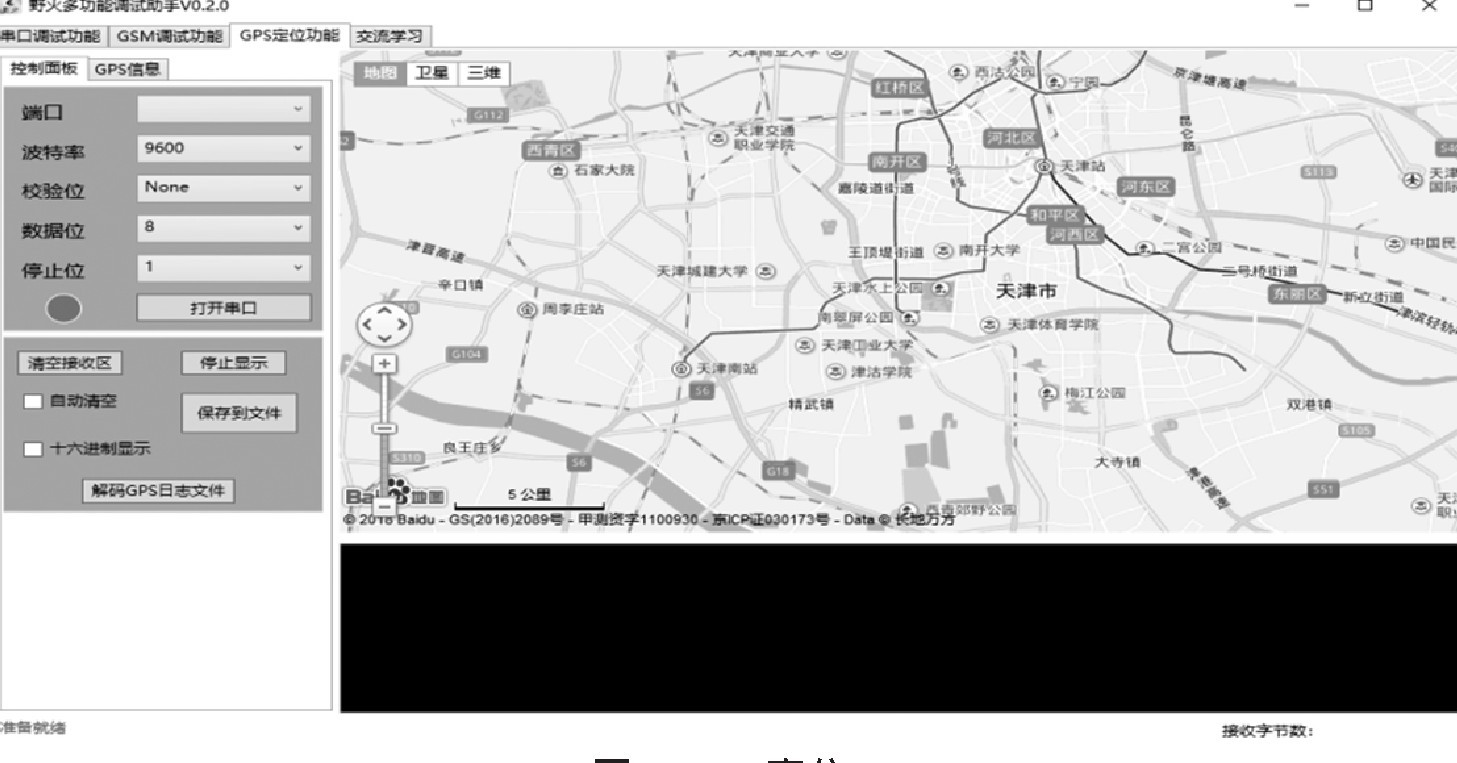
GPS主要用于机器人的地理地形位置定位, 可以及时锁定机器人所处位置, 快速查找故障路线位置, 进行及时的维修。GPS可用其自带App就可实现定位。GPS定位模块如图8.
3、 结束语
高压线路巡检机器人以高压线路地线为作业路径, 可完成基本巡检任务的机器人。设计基于STC89C52单片机并结合PC104中控机的巡检机器人的控制系统。结合输电线路巡检作业环境, 通过分析设计了一种适合运行于高压线路地线的本体机构;通过分析其作业内容, 设计其通过所携带的温度传感器、摄像机、GPS、无线通讯等设备对线路进行检测与数据传输。所设计巡检机器人有助于提高高压线路巡检的工业化及自动化程度、提高巡检的效率、减轻巡检工作人员的劳动强度、降低巡检过程中的成本、确保电力线路的稳定运行。
图8 GPS定位
参考文献:
[1]张成巍, 岳湘。智能巡检机器人研究现状与发展趋势[J].电工文摘, 2015 (01) :9-12.
[2]许博。高压线巡检机器人的设计与研究[D].哈尔滨工业大学, 2017.
[3]李正。高压输电线路自主巡检机器人的研究[D].上海大学, 2013.
[4]陶冶, 袁永超, 罗平。基于DS18B20的单片机温度测量系统[J].农机化研究, 2007 (10) :160-164.
[5]计长安, 张秀彬, 应俊豪, 等。基于PC104的实时工业图像检测[J].微计算机信息, 2006 (29) :212-214.
[6]艾春雨, 潘翔, 卢玉琴。智能机器人巡检系统在变电站中的应用[J].科技创新与应用, 2016 (33) :214-215.
[7]杨军伟, 曹海。集控站智能巡检机器人的设计及应用[J].科技创新与应用, 2015 (33) :179.