24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժ Ҫ
�����ӽ�������ǹ�ҵ������һ����Ҫ�ļӹ����������乤���ںܴ�̶��Ͼ������ӽ�����������������侫�ȡ�Ŀǰ������ҵ��������Ϣ�����Զ����ķ���չ�����Ż����˼�����������죬���Dz�ֹ�ǹ�ҵ�����е��Ͷ��������������һЩΣ���Ҿ߸��Ѷȵ�����ͬʱ�����������صĿ���һֱ���о��ȵ㣬��·���滮���˶���Эͬ���Ƶȡ������ִ���ҵ�Բ��û�����������������������ҵ�����������ߣ����Ķ������ɶȻ�е�۵�������������о������ڴ˻����ϣ��Ի�����Ϊý�������绯Զ�̿���ϵͳ���Ӷ�ʵ����Զ�̿��ƻ����˽�������ӹ���Ŀ�ģ�����˻��������乤�յ����ܻ����Զ����̶ȡ�
�������ĸ��������ɶ�ֱ��������������ˣ����а����˶��������켣�滮��Զ�̿��Ƶȹؼ��������ڵ��о���ʵ�顣�������£�
�������ȣ��������ɶȻ�е�۵�����ṹ��ƽ��в�������������ɶ�ֱ���������������Ӳ��ƽ̨�������������˿���ϵͳ���õ����ŷ����������˶����ƿ�����������������ϵͳ���Ƴ���ı�д��
������Σ��Ի��������乤��·���滮�����о���ͨ�����������ɶ�ֱ�����������������������ϵ���õ� D-H ������������ص��˶�ѧ��������û������˶�ѧ���̡��ڴ˻������ٶԻ�����ʵ�����乤���е�����·�����г����д��
����֮�Ի������˶��켣�ڹؽڿռ�͵ѿ����ռ��зֱ�����˶��滮�����ö���ʽ�岹�滮�˶������еĹؽ��ٶȣ����÷ֶκ���������Һ����滮�����ϰ��ﻷ���е�����켣�����û��������˼��Ľ����˹��Ƴ����滮�����ϰ��ﻷ���еı��Ϲ켣��ͨ����ѧģ�Ͳ�Ӧ�� Matlab ��������֤�����㷨�Ի����˽�������ӹ��˶��Ŀ����ԡ�
�������ʹ�������������� Python ��������ͨ������������������ն��������ɶȻ�е�۽��н�ϣ�ʵ�ֻ����������Ļ�����Զ�̿��ƣ���ͨ��ʵ�������֤��
�����ؼ����� �����ɶȻ����ˣ��˶����ƣ��켣�滮�����绯Զ�̿���

Abstract
����Sheet metal bending is an important processing method in industrial production, and thebending process largely determines the final quality and bending accuracy of sheet metal parts to agreat extent. At present, the manufacturing industry is developing towards the direction ofinformatization and automation. With the increasingly mature application of robot technology, theyare not only the labor force in industrial manufacturing, but also able to complete some dangerousand difficult tasks. Due to the continuous development of industrial robots towards automation, thetopics related to robots have been the focus of research, such as path planning, motion andcooperative control. With the increasing demand of modern enterprises for using robot to cooperatewith bending machine for bending operation, this paper studies the bending operation of thefive-degree-of-freedom manipulator, and on this basis, a networked remote control system is builtusing the internet as the medium, so as to realize the purpose remotely controlling the robot, andimprove the degree of intelligence and automation of the robotic bending process.
����Based on the five-degree-of-freedom rectangular coordinate bending robot, this paper conductsresearch and experiments including key technologies such as motion analysis, trajectory planning,and remote control. Specifically as follows:
����Firstly, the overall structure design of the five-degree-of-freedom manipulator is described, andthe hardware platform of the five-degree-of-freedom rectangular coordinate bending robot is built.
����According to the servo driver and motion control card used in the control system of bending robot,software debugging and system control program writing were carried out.
����Secondly, the robot bending process path planning is studied. By establishing thefive-degree-of-freedom rectangular coordinate bending robot connecting rod coordinate system, theD-H parameters are obtained and the relevant kinematics analysis is carried out to obtain the robotkinematics equation. On this basis, the bending path in the robot bending process is programmed.
����After that, the motion trajectory of the robot is planned in joint space and cartesian spacerespectively. Polynomial interpolation is used to plan the joint velocity in the process of motion, thebending trajectory in the environment without obstacles is planned by the combination of piecewisefunction and sine function, and the obstacle avoidance trajectory in the environment with obstaclesis planned by the rapidly-exploring random tree algorithm based on an improved artificial potential field method. Through the mathematical model and the application of Matlab software to verify theabove algorithm for robot bending processing motion feasibility.
����Finally, the Internet of Things technology and Python development technology are used tocombine various terminals with a five-degree-of-freedom manipulator through a web server torealize the remote control of robots based on the Internet of Things and verification throughexperiments.
����Key words: Five-DOF robot, Motion control, Trajectory planning, Networked remotecontrol
Ŀ¼
������һ�� ����
����1.1 ����������
����1.1.1 ��ҵ����������о�����
����20 ���� 70 ���������ҵ���������ҹ���ʼʹ�úͷ�չ��"����"�ڼ䣬��������Թ�ҵ�����˵Ļ��������Ͳ������о�[1],����˹�����������ҵ�����˵Ļ������������а����˻����˵Ľṹ��ơ�������Ԫ������ϵͳ������ϵͳ��С�������������ȡ��� 20 ���� 80 �����Ϊ�˸��ٹ��ҵ�����˵��Ƚ����������ܻ����˵��о��Ϳ����������ڹ���"�����о���չ�ƻ�"��[2],�������ܿ����㷨�������Ӿ������ܴ������ȶ�濪չ���о�����ȡ����һ���ijɾ�[3].90 ��������ҹ�������������Ϳ�����ӡ����ˡ�װ��ȷ���Ļ����ˡ�ͬʱ���Ӿ�������Ӧ�������������������õ�����ظ߿Ƽ���Ŀ��֧�֣�����ʼ�з�Ӧ�ù��̡��� 90 ������ڣ����ӻ����˱�ѡ��Ϊ�з����ص㣬�Ա�������պ��ӻ����˹ؼ�������90 �������ڣ���ҵ��������������������������ʵ���˹��������˵���ҵ���������꣬�й��Ĺ�ҵ�����˳�����һֱ���ڸ��������Σ����ﲻ����"�������� 2025"������Ӱ�죬�����ҹ���ҵ������������������������ʾ���� 5 ���ҹ��������г�ƽ�������ʽӽ� 30%[4],�� 2013 �꿪ʼ���ҹ���Ϊȫ�����Ļ������г������������ȫ����λ���ҹ��������г�δ��ǰ�����ڡ�
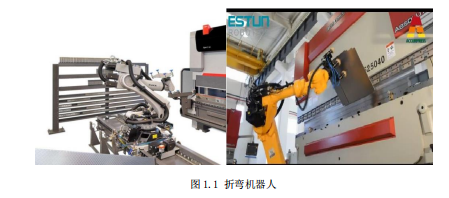
�����ڻ�е�ӹ������У����似��ռ���Ų��ɻ�ȱ����Ҫ�ԡ���������ҵ���ܻ����Զ����̶ȵIJ�����ߣ����Ƕ�����ӹ���Ч�ʼ�����Ҫ��ҲԽ��Խ�ߡ���Ŀǰ��ҵ�����У��ӽ��������ӹ���Ҫ�������˹��������������������[5].�����ӽ������������У��˹���������������������������ķ�ʱ����Ч�ʽϵͣ����ҹ��������ܹ��˵IJ��������̶�Ӱ�죻���ӵĹ���������ǿ�ȵ��Ͷ�ͬʱҲ��Σ���Ź��˵Ľ������������似���IJ��ϸĽ��Լ��˹��Ͷ��ɱ������ӣ�Ϊ�������ҵ�ľ�������һЩ��ҵ��ʼ����ҵ���������뵽����ӹ������У������˸����Զ��������Ϊ��ҵ��չ���������ƣ���ͼ 1.1 ��ʾ��
��������������ǹ�ҵ���ٷ�չ�µIJ��ͬ�������ˡ����˻�����һ�����ܴ�̶��ϰ�����߹���������Ч�ʡ���������Ϊ�Զ���������ˮ���ϲ��ɻ�ȱ�������豸���䷢չˮƽ�ѳ�Ϊ����һ�����ҿƼ�ˮƽ����Ҫ������[6].��ҵ�����˷�չ�ķ��������ž����˻���������ȫ�����ܻ��ķ���չ����ҵ���������й��ķ�չ����˵����������ͬʱҲӵ���ž�չDZ�����������ɻ������Զ����ɷ�����˾�����հ���������װ������˾����������ʵ�Զ����ɷ�����˾������һ���ľ�Ӱ������֪���ȵĻ����˹�˾���������� AmericanRobot,ST �����˹�˾��������� ABB,�ձ��� FANUC,Ӣ���� Auto Tech Robot,�¹���KUKA Roboter,Trumpf,���ô�� Jcd International Robotics,��ɫ�е� Robogp Tek ��˾�ȣ����Ƕ��ѳ�Ϊ���Թ��һ����˲�ҵ�������ߣ������ƽ������˵���о������»����˵�Ӧ�ü������ٽ������˲�ҵ�ķ�չ���ù�ҵ������Խ��Խ���ܻ���ʵ�û���
����1.1.2 ��ҵ����������о�����
���������˼�����һ�����Ҽ�����ҵ�Զ�������Ҫ��־������[7].�����Զ�����ҵ�Ĺ㷺Ӧ�ú�����ʱ���ĵ����������˼�������Ӧ���ڹ�ҵ��������������ķ������档����ֻ����˲�Ʒ������������Ч�ʣ������˳ɱ���ͬʱҲ�������DZ����˺ܶ�Σ�յ���������Ԯ���ű����ռ�վ����״̬���ȡ�Ŀǰ����Ӧ��������������ҵ�����˸�����dz�֮�㣬���������������㲿�����졢�ӽ�ӹ��ͻ�е�ӹ����������� 3C ���ӡ���������ҵ�ķ�չ���������������ҵ������Ҳ��������Щ��������
�������Ź�ҵ�����IJ��ϸ��£��ӽ�������ѳ�Ϊ��ҵ�����˷�չ�����ӹ�����Ҫ������������˵Ĺ���ԭ���ǣ�������������ڽ��й���֮ʱ������������ˣ����е�ۣ����������������䡣���������˹���������������ȣ�����������������������������乤�ղ����������¼����ŵ㣺
������1���ӹ�Ч�ʸߣ���������˿��������ؽ��й������������ٹ��˵Ĺ������������Ƕ��ڴ��Ͱ�ĵ����䣬��Ҫ������乤�����̳�������Ҫ�ܶ�˵���ϣ������������˿���߹���Ч�ʣ�һ���̶������̼ӹ�ʱ�䡣
������2����Ʒ�ӹ��ϸ��ʸߣ������������˹����ж�λ��ȷ���ظ���λ���ȸ��ߵ��ŵ㡣
������ͳ�˹�������������������ҵ����Ҫ����ʹ��˫���о��ӽ������������˶�����Ʒ�����ܹ���Ӱ�����ؽϴ�Ʒ��������һ��
������3���ӹ���ȫ��ǿ���������������������ϵĹ������ƣ����������ͳ�Ĺ�������������ϵĹ������ƣ�����һ���̶��ϱ�����ڼӹ����������ˣ��Ӷ�����˹����еİ�ȫ�ԡ�
������4�����������ɱ������������ɡ����ӽ������ӹ������У�ͨ����Ҫ������������������ȥ��������������һ̨��������˾Ϳ�����������Ͷ����ˣ�����������������ҵ�ɱ���ͬʱҲ����˹���Ч�ʣ����������Ա���������ϵ�����⣬�һ����˸��»������ڻ�������ͨ���ij�������Ӧ��ͬ������������������Ӧ���豸Ͷ�ʣ�ʵ������ת��������"���˻�"�����ӹ�ʱ����
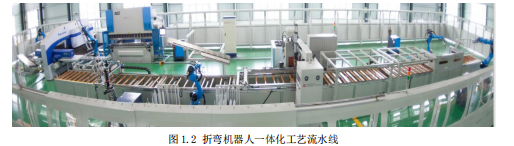
����Ŀǰ���ӽ�ӹ���Ԫ��Ҫ�������е�۽����������ϡ�������������������Լ�һЩ�����豸���и��������ַ���ʽ�ļӹ���ʽ���ڿɿ��Բ��ߡ�����Э�����ӵ����⣬���������ִ���ҵ���ܻ�һ�廯����Ҫ������δ����������˺�����������Լ���ظ����豸��һ�廯��һ��չ���ƣ�������ϵͳ��һ�廯��Զ�̻�������һ�����ƣ���ͼ 1.2 ��ʾ��
�������ܹ���ɸ��ָ����ӽ��գ��������Ч�ʣ����ӹ��ܵ�ͬʱ�����Ƹ��Ӷ������������δ���ķ�չĿ�ꡣ�������ֵ��������������������Ϊ������١��Զ��������Ի���������Ҫ����������ͨ��������������������λ������������ʵ��Զ�̿��ƣ�Ϊ��һ���ھ�����˲�ҵ��DZ�ڼ�ֵ�ṩ����Ҫ;����ͬʱ���豸��״̬���Ҳ�ǹ�ҵ 4.0 ����Ҫ����֮һ[8].�ü���ּ��ͨ�������˵��������������Χ�豸����λ��֮�佨��ͨ�����磬��ʵ����λ���Ի����˵�Զ��ͨ�ţ�����������ڸ��ӻ����е����Ӷ��γ�Զ�̿���ϵͳ����ͼ 1.3 ��ʾ�����绯Զ�̿��ƾ��������ŵ㣺
������1�����������������Զ�̿����ܹ��Թ������е�������е������Ч��ͳ����ȣ�����豸֮��������������������
������2����߰�ȫ�ԡ�����Զ�̿����ܹ������е��ն˽�����Ч�ļ�أ��ڳ�������ʱ��ʱ���棬��߰�ȫ�ԡ�
������3�����칤���ռ䡣����ʦ���о���Ա���������ֳ�����Զ�̲鿴�������������������Ի�е���иĽ�����������������о��ȡ�

����1.2 ��ҵ������·���滮�㷨�Ĺ������о���״
�����Ի�����·���滮���о�ʼ�� 20 ���� 70 �����������·���滮Ŀ������ʹ�ù滮�㷨�������£��ܹ������ϰ���Ĺ����ռ��ڣ���Ƴ�һ������㵽�յ������ײ·��[9].�ڴ˻����ϣ�ͨ�����������������ϣ����г���̣�����ʱ�����٣��������ŵȣ�Ϊ�������ṩһ����ѵĹ滮·��[10].������·���滮ʼ����Ϊ������������Զ���������ȵ����⣬�䲻��Ҫ��֤����ײ·������С���ƶ����룬���һ�Ҫ�ڳ����ϰ���Ļ������ṩ�ӳ�ʼλ�õ�Ŀ��λ�õ�ƽ������·����Ϊ�˹�����ѧ�߶Ի�����·���滮�������˴����о���������˶��ַ�����
��������ѧ�� Sourya Dipta Das[11]������Ի�������������·���滮���⣬���һ�ֻ��ڲ�ֽ����㷨�Ľ���·���滮���������һ�����ʵĴ��ۺ��������ٻ������ֱ۹ؽڳ�ʼ����������֮�������·������Ӧ���ڶ��ϰ��﹤���ռ��еĹ�ҵ�������ֱۣ�Tse-Ching Lai[12]���˿��ǵ�������ĩ��ִ�������ϰ���֮��İ�ȫ�����Ա�����ײ���������һ�ֻ��ڷǾ������� B �������ߵĻ�е�۱����·��������� B ����������ϵķ���Ѱ�Ҿ��� B �����������ԵĹ켣���Ƶ㣬ͨ������ϰ������������·�����Ӷ�����һ������ȫ��·����KwangjinYang[13]���˶����ҵĻ����н��в�ͬ���������µĹ滮�����о������ϰ���ͻ����˵���Լ�����������ڣ���Բ��Լ�����ƶ����������һ�ֻ��������Ŀ�������������Ļ�����·���滮������ͬʱ�����ⲿԼ�����ڲ�Լ�����÷�����֤�����ߵ������Բ�������������Լ����Tatsushi Nishi �� Yuki Mori[14]����Լ���˶��滮�������Ϊһ������������С�������Ż����⣬���һ�ֻ����Ƴ����˶��滮��������Ŀ�����ڸ����������ֱ۶���ѧ������£�ʹ�������ĺ������ʱ��ļ�Ȩ����С���÷����ڽ�Լ��Դ���ĵ�ͬʱ���Ż��˹�����ʰȡ�㣬ʹ�����ʱ����С����MarcoA.Contreras-Cruz[15]���˽��˹���Ⱥ�㷨������滮�㷨���ϣ�ͨ��һ��ֲ�������ϸ������·�������һ���µĻ���Ԫ����ʽ������³���㷨��������ǰ������ת��ɵ�·�����뾭��ĸ���·��ͼ�������������Ͷ��Է���������Ч�Ĺ滮·�����ȡ�ƽ���ԡ�����ʱ��ͳɹ��ʣ�P.K. Das[16]���������˹��ڶ�����˵Ĺ켣·���滮���⣬�������ֻ���ԭ�������һ�ֻ�������Ⱥ�㷨�Ͳ���㶯�ٶ��㷨��ϸĽ��ľ��� Qѧϰ�㷨����ȷ�����һ����¶�����˵�·���Ż��켣�㷨����������ԡ�ͨ���IJ��������Ŷ��ٶȣ���������ٶȺ���������ָ�ꣻHyun Woo Kim[17]���˿��ǵ���е��ĩ��ִ����������Ի��е�۱���������ƶ��������һ�ֻ��������˶�ѧ��ĩ��ִ��������˶������·���滮�㷨����������ֵ�ֽⷨ���Ż��ɲ����Ȳ�����ʹ�õ�λ��������������ĩ��ִ������������ʹ�����ƶ���Ŀ��λ�á�ͨ�������ʵ����֤�˸��㷨�Ŀ����ԣ����˷������ܲ������ڱջ��˶�ѧ��
��������ѧ����������Ȫ[18]����ʹ�ý�����������Ǿ�ȷ�IJ����������е�۵�״̬�ռ�ؽڶ����������һ�ֻ��� Q ѧϰ�Ļ������ֱ�·���滮�����������뽱���������ڿ��ǻ�����ĩ��ִ������ǰλ�õ�Ŀ��λ�õľ��롣ʵ����������Q ѧϰ�����ܹ���Ч�ع滮�������ֱ۵�����ײ·����ׯ���������[19]���������һ������˫�ۻ�����·���滮�ı䲽�����ɿ��������������VT-RRT���㷨��ͨ���� RRT �㷨������ڵ������ռ�ı任������Ŀ��λ������Ӧ�����������������������µĸĽ��㷨������Ŀ�������������㷨��ȣ�������Ч���������Ч�ʣ����ٵ�������������·���滮ʱ�䣬ͬʱ���³���ԣ��ڽ���[20]����Ϊ�˼��ӵĻ�е���˶��滮�����е�۵����ܻ��������һ�ֻ��ڵݹ�������Ļ�е���������ϵͳ�����õݹ��������ԭʼ���ݽ���ѵ�����õ�����켣��������ֱ۹ؽڽǶ�֮���ӳ�������ԡ�ʵ�����������÷���ϵͳ�������Լ��ӵ��˶��滮������ԭ�������ʾ�����ҿ���������仯ʱͨ�����Է���ʵ��������ķ��棻���˹�������[21]�������ö�̬ģ���������������˵����˶�ѧ����һ���̶�����������Ч�ʣ�������ģ�Ͷ� KR16-2 �����˽��и����˶��켣���棬֤���˸÷�������⾫�Ⱥ�Ч�����⣻֣����[22]���˿��ǵ��ֱ�����խ�ռ��н��в�����һ���⣬�����Ƕ����ж�����˵Ļ�е�ۡ�Ϊ�˱�����ײ�����һ������Ŀ������������·���滮�㷨���滮��һ��ƽ��������ȶ���·�������㷨�ȿ����˻����е��ϰ���ֿ������˶�ѧ������ѧ���ڲ�Լ������֤�����ʵ������ԣ�����ĩ��ִ����������һ���ķ���Լ���������־��[23]���������һ�ָĽ���������ֵ����������������������Ŵ��㷨�������·���滮�����и��ӹ������Ͳ����������������⡣�����Լ���ؼ��ټƻ����ͼ�������ͬʱҲ����Ӧ���ڸ������͵Ļ����ˣ����ڻ����˹켣�滮�йؽ�֮�临�ӵķ�����Լ���������������[24]�����ڹؽڿռ��в��øĽ�����ζ���ʽ��ֵ����ʹ�ؽ���Լ��������ƽ���ƶ����������� B ������ֵ�Զ���ʽ��ֵ��������ͨ����ϸ����ڽ����һЩʵ�ʵĹ��̹滮���⣻���ؠ�[25]����ͨ������դ�������˻����˵Ĺ�������ģ�ͣ������Ľ���̰���㷨���Ŵ��㷨���ϣ��ı���դ��ϵ����ģ���˻�ϵ���Ĵ�ͳ���壬�����̰���㷨��һֱ���Խ���ľֲ��������⣬������˸Ľ���ģ���˻��㷨�����[26]���������һ�����ȫ��·���滮����Ľ��� A*�㷨����� A*�㷨�滮·������������㡢·�����Ⱥ�ת�۽ǶȽϴ�����⣬����� A*�㷨�滮����·������С�ķָ�����л��֣��Դ˻��һϵ�е�·���ڵ㣬������������㷨����Ч�ؼ�С·�����Ⱥ�ת�۽Ƕȣ���־[27]���������һ�ָĽ����˹��Ƴ�������������ǰ���ķ����������Գ��������ɺͼ�����ƽ����˵����Խ���䴦�ھֲ���С��������������滮·�������⣻����[28]�о��˻�����ĥ���Զ������Ƽ���������/λ��Ͽ��Ƽ��������Ź켣�滮���������������о���
����1.3 ��ҵ���������绯Զ�̿��ƹ������о���״
�������ŵ��¼�������������缼���ĸ��ٷ�չ����Ч�شٽ��˻�����Զ�̿��Ƽ����Ĵ��¡�
����Ŀǰ������֪�����£�ͨ��ijЩ���������Ӿ��������ŵ������ȣ����ܹ��û�������һ���̶���ʵ���������ơ�����һЩ���ӵĻ�������������ҵ�У�Ϊ����һЩDZ��Σ���ķ������ͱ���Ի����˲���Զ�̿��ơ���ˣ��Թ�ҵ�������ڰ�ȫ�ɿ��ͼ�ʱ�Ŀ���������������˷dz��ߵ�Ҫ��[29].
��������ѧ�� Viktor N. Sheludko[30]���������һ�ֻ��ڼ����Ӿ���ȺЭ�������˷�ɢ����ϵͳ����ϵͳͨ��Զ�̹���վ�����źŽ������ƻ������ƶ�������ͨ��������ʵʱ���ٻ����˵Ĺ켣���ҷ�������Ϊ����û��ṩԶ�̷���Ȩ�ޣ����ɽ��ն�̨������Ŀ��ƶ�����PutovA.V. [31]���˽����ڿͻ���-������ģ�ͺ����ݴ���Э���������˶�λ�Ϳ���ϵͳ�У�����ͨ�����������������ʵ�ֶԻ����˵Ŀ��Ʋ�����Teodorescu R M[32]�������� XBEE ����ͨ�ż���ʵ���ƶ�ƽ̨��Զ�̿����豸֮���˫��ͨ�ţ�XBee ����ģ��һ��Ӧ���ڹ�ҵ����ѧ��ҽѧƵ�Σ�2.4GHz �� 868MHz����ͨ�� Labview ����ʵ�ֿ��ƹ��ܵĿ��������У�AdityaSundaram[33]���˲��ñ�Э����˻��ӿڣ�ʹ�� web �������ʹԶ���û�����ͨ�� Internet�ṩ���Ӿ������п����ƶ��������ڷ�տռ����˶�����������һ�ֻ����Ƽ�������绯������ϵͳ��ʵ�ֺ����ܷ�����Jan Nádvorník �� Pavel Smutn?[34]�� Eclipse ���ɿ��������п����� Android ����ϵͳ���ƶ�Ӧ�ó���ʹ�� Lego Mindstorms �������߰�������������������ʵ���ƶ������˵��ֶ����ơ�
��������ѧ�߳�ΰ������[35]���˴��һ���ƶ�������Զ�̿���ϵͳ����ϵͳͨ��ʹ��ָ����鷽ʽ�Լ��������ƻ��ƣ�ʵ�ֶԻ����˵Ŀɿ����ƣ������[36]����Ϊ�˿˷�����ͨ�Ŷ��������ܵĸ���Ӱ�죬�����Ե��о���һ�ҵ�����л�����������������Ż��뷴�����ơ����һ�ּ�������������һ�������ͨ��ģ�ͣ������ߴ������������뵽˫�㹤ҵ���п��ƽṹ�У������в����е���̫�����в��䣻�����ĺ���ϼ[37]ͨ���������˿�������TCP/IP Э�����ͨ�ţ������ϵͳ�������������Ƶ� C#��д�� IRC5 ��������ʵ����ֱ��ͨ����̫���� ABB �ͻ����˵�Զ�̿��ƣ�������[38]��������ƶ��ն�֮��������Զ�̿��Ƶ����⣬�����һ�ֻ��� Android ƽ̨��Զ�̿���ϵͳ��ͨ���ͻ���-������ģ�ͣ���ѭAndroid Ӧ�ù淶������ Java ���Կ�����Զ�̿���ƽ̨���ܱ��ɡ�����ʤ[39]������Ե�����������ϻ����˼�����һ�������ƣ�����˻�����ƽ̨���ƶ�������Զ�̿���ϵͳ���û�����ͨ������ Android �ֻ�Ӧ�ó���ʵ���ƶ������˵�Զ���˶����ƣ��Ҹ�ϵͳ��Ӧ�ٶȿ죬�����ȶ����ﵽ��ң��Ҫ��������������[40]����ͨ�� 4G ����ͨ�ż���ʵ�����ƶ������˵�Զ�̼��ϵͳ��������������� 5G ģ��� 5G �ֻ��ն������Խ��ʹ��������ӳ١�
����1.4 �����о����ݼ����µ�
�����������Ⱦ�Ŀǰ��������ڵĹ�ҵ�����������������ϵķ�ʽ�����������˴����ĵ��кͷ��������һЩ�����˹����������ڵ����Ч�ʵ͡����ɶȲ��ߡ�ʵ���Բ�ǿ�����⣬��Ƴ������ɶ�ֱ����������ˡ���Σ�������Ƴ��������ɶ�ֱ����������˴��Ӳ��ƽ̨�����Ի����˵������˶����̵�·�������㷨�滮�����ͷ��档���ͨ����������������绯Զ�̿���ƽ̨��Ϊ�Ժ��ʵ����֤�ṩ���������ľ����о��������£�
������1������������Ƶ������ɶ�ֱ��������������ˣ�ѡ����Ӧ���ŷ�������ŷ�������������˶����ƿ���ҵ��������������ϵͳ����ƽṹ�������Ӳ��ƽ̨�͵������ƹ�Ĵ��������ѡ���ŷ�������˶����ƿ���ͨ����Ӧ���������ֱ���ɶ��ŷ�������˶����ƿ��ĵ��ԣ�ʵ��ͨ���˶����ƿ���ɶ��ŷ�������˶����ơ�
������2�����������������·���滮�������涯����ؼ��������ʵ����������Ƶ������ɶ�ֱ��������������˽�������ϵ������ D-H ��������������˶�ѧ������֮��Ի������������������ѧģ�ͣ�����д�����涯����
������3���Ի������˶��켣�ڹؽڿռ�͵ѿ����ռ��зֱ�����˶��滮��Ӧ�ö���ʽ�岹�滮�˶������еĹؽ��ٶȣ�Ӧ�÷ֶκ���������Һ����滮��е�۸����ӽ���������乤�յ�����켣��Ӧ�û��������˼��Ľ����˹��Ƴ����滮�����ϰ��ﻷ���еı��Ϲ켣��
����ͨ����ѧģ�Ͳ�Ӧ�� Matlab ��������֤�����㷨�Ի����˽�������ӹ��˶��Ŀ����ԡ�
������4��Ϊʵ�ֶԻ�����λ�����ꡢ�����������ٶȵ�ʵʱ��ʾ��ʵ�ֶԻ����˵ĵ㶯�˶��������˶�����λʾ���˶���ʵʱ���ƣ��Լ��Ի��������й����еı�����Ϣ���豸�����ʡ��豸����ʱ���Ƚ���ͳ�Ʒ��������� B/S �ܹ������� python ���Ժ� Mysql ���ݿ���п��������� TCP/IP ͨѶЭ��ʵ�ֺͻ����˵����ݽ���������ʵ�������ɶȻ�����Զ�̿���ϵͳ�Ĵ��
�������ĵ���Ҫ���¹��������¼����֣�
������1������ӽ�����乤�յļ�����״����ʵ�������е������ɶ�ֱ��������������˵�·���滮�����о��������������˵������涯�������̣����÷ֶκ���������Һ����滮��е�۸����ӽ���������乤�յ�����켣�����û��������˼��Ľ����˹��Ƴ��㷨���ϰ��ﻷ���еı��Ϲ켣�����˶��滮�ͷ��棬��Ӧ�����ӽ����ʵ�����������
������2����ƻ�е�����绯Զ�̿���ϵͳ��ʵ��Զ�̿ͻ���������������ݽ����Ϳ��Ʋ�����
����1.5 ��������ṹ
������һ�£����Ȳ�����ҵ�������ڹ�ҵ��������ļ�ֵ�����壬��Թ�ҵ������Ŀǰ�ļ�����״����켣�滮��Զ�̿��Ƶ�չ���������������ӽ����������Ĺ�������״������ϸ��̽�֡�
�����ڶ��£���ϸ������������Ƶ������ɶ�ֱ��������������˵Ļ�е�ṹ�����������ѡ����Ӧ���ŷ�������ŷ�������������˶����ƿ�����������ϵͳ����ƽṹ�������Ӳ��ƽ̨�͵������ƹ�Ĵ��������ѡ���ŷ�������˶����ƿ���ͨ����Ӧ���������ֱ���ɶ��ŷ�������˶����ƿ��ĵ��ԡ������˶����ƿ������б�дģ�黯����ʵ��ͨ���˶����ƿ���ɶ��ŷ�������˶����ơ�
���������£�����ӽ�����乤�յļ�����״������Ϲ�ҵ�����˵��˶����ԣ���ʵ�������е������ɶ�ֱ��������������˵�·���滮�����о������� D-H ��������������������ϵ�����������˶�ѧ���̣��ٸ����˶����̱�д����ʵ�����Զ����������
���������£����ò岹���ͻ��������˼��Ľ����˹��Ƴ��㷨�ֱ������������ѧģ�ͽ��й켣�滮�ͷ��棬������Ӧ�����ӽ����ʵ�����������
���������£�Ϊʵ�ֶԻ�����λ�����ꡢ�����������ٶȵ�ʵʱ��ʾ��ʵ�ֶԻ����˵ĵ㶯�˶��������˶�����λʾ���˶���ʵʱ���ƣ��Լ��Ի��������й����еı�����Ϣ���豸�����ʡ��豸����ʱ���Ƚ���ͳ�Ʒ��������� B/S �ܹ������� python ���Ժ� Mysql ���ݿ���п��������� TCP/IP ͨѶЭ��ʵ�ֺͻ����˵����ݽ���������ʵ�������ɶȻ�����Զ�̿���ϵͳ�Ĵ��
���������£���ȫ������ɵ��о��������й������ܽᣬ����δ�������ɶ�ֱ����������˵ĺ����о��������˽�һ����չ����
�����ڶ��� �����ɶȻ�е�ۿ���ϵͳ�������
����2.1 ����
����2.2 �����ɶȻ�е������ṹ����
����2.3 �����ɶȻ�е�ۿ���ϵͳӲ��ѡ��
����2.4 ����ϵͳ�������
����2.5 ����ϵͳ��������
����2.5.1 ������ŷ�����������
����2.5.2 �˶����ƿ������������д
����2.6 ������
���������� �����ɶȻ�е���˶�ѧ�������������
����3.1 ����
����3.2 �����ɶȻ�е���˶�ѧ����
����3.2.1 �����ɶȻ�е������ϵ�Ľ���
����3.2.2 �����ɶȻ�е���˶�ѧ���
����3.3 �����ɶȻ�е�������˶�ѧ����
����3.4 �����ɶȻ�е�������涯�������
����3.4.1 �����涯��ƿ��
����3.4.2 �����д
����3.5 ������
���������� �����ɶȻ�е���˶��켣�滮�㷨������
����4.1 ����
����4.2 ���ڲ岹�����˶��滮
����4.2.1 �ؽڿռ�岹�˶��滮
����4.2.2 �ѿ����ռ�岹�˶��滮
����4.3 ���ڷֶκ���������Һ������˶��滮
����4.4 ���������˼��Ľ����˹��Ƴ����켣�滮
����4.4.1 �˹��Ƴ���
����4.4.2 ������㷨
����4.4.3 ���������˼��Ľ����˹��Ƴ���
����4.5 ������
���������� �����ɶȻ�е��Զ�̿���ϵͳ���
����5.1 ����
����5.2 ���绯Զ�̼��ϵͳ
����5.3 �����/������ģʽ
����5.4 Զ�̿���ϵͳ������ʵ��
����5.4.1 ��������˵��
����5.4.2 ϵͳ��ȫ������ʩ
����5.5 �����ɶȻ�е��Զ�̿���ϵͳʵ��
����5.6 ������
���������� �ܽ���չ��
����6.1 �����ܽ�
���������������Ч���߾��ȵ������ڹ�ҵ�����еõ��˹㷺Ӧ�á��������ߵ�����Σ�����Ȥ������֮һ����ν���Щ�����������ĵ�����������͡��Լ������˵Ĺ�ҵ�������ܻ����죬��������ƣ�͵����ض�Ӱ�쵽��ˮ�ߵ����������������������ҵ��Ʒ����������Ʒ���ʣ��������幤��Ч�ʡ��������ȶԻ���������·���滮�����о���ͨ�����������ɶ�ֱ�����������������������ϵ���õ� D-H �����������˶�ѧ�����������Ի���������·�����й滮�ͷ��棬��֤�����˽�������ӹ��Ŀ����ԡ������ݻ������˶�ָ������Զ�����о�����Σ�������ɶ�ֱ���������������Ӳ��ƽ̨�������ŷ�������ŷ����������˶����ƿ����������ƹ��ѡ�͡���װ�����ٴΣ���������ɶ�ֱ������������������õ����ŷ����������˶����ƿ�����������������ϵͳ���Ƴ���ı�д�����ʹ�������������� Python ��������ͨ������������������ն��������ɶȻ�е�۽��н�ϣ�����е�ۿ��ƶ���չ����ҵ���������������ǻ���������һ�����ֻ��ϣ�ʵ�ֻ����������Ļ�����Զ�̿���ϵͳ��
����������Ҫ����������о�������
������1�����������������·���滮�������涯����ؼ��������ʵ����������Ƶ������ɶ�ֱ��������������ˣ�ʵ�����Զ��滮·����
������2������������Ƶ������ɶ�ֱ��������������˵ĸ��������ѡ����Ӧ���ŷ�������ŷ�������������˶����ƿ���ҵ�����������Ӳ��ƽ̨�͵������ƹ�Ĵ��
������3��������ѡ���ŷ�������˶����ƿ���ͨ����Ӧ���������ֱ���ɶ��ŷ�������˶����ƿ��ĵ��ԣ�ʵ��ͨ���˶����ƿ���ɶ��ŷ�������˶����ƣ�4��Ϊʵ�ֶԻ�����λ�����ꡢ�����������ٶȵ�ʵʱ��ʾ��ʵ�ֶԻ����˵ĵ㶯�˶��������˶�����λʾ���˶���ʵʱ���ƣ��Լ��Ի��������й����еı�����Ϣ���豸�����ʡ��豸����ʱ���Ƚ���ͳ�Ʒ��������� B/S �ܹ������� python ���Ժ� Mysql ���ݿ���п��������� TCP/IP ͨѶЭ��ʵ�ֺͻ����˵����ݽ���������ʵ�������ɶȻ�����Զ�̿���ϵͳ�Ĵ��
����6.2 չ��
����һ������£���ҵ��չ�Ⱦ����Զ���Ȼ���ٵ����ܻ���Ŀǰ�ҹ������칫˾�������Զ��������У����ܻ�ƫ�٣��������ܻ��г���ʵ��Ȼ����̽�����ԵĽΡ���Ŀǰ���Ŵ����ݡ������Ӿ��ȼ����ķ�չ�������а�����е�����ڵij�����ҵ����������ҵʱչ�ֳ���"���Ͷ�"��"�����"��������������ߡ�������Ȼ�������ɶ�ֱ������������������������������乤���е��˶��滮��Զ�̿��ƽ������о���ʵ�飬����Ȼ�����Ų��㣬�����������¼��������һ�����ƣ�
������1���������ɶ�ֱ��������������˵��Զ���̼������е��о����������ơ�Ŀǰ������ҵ��ԷDZ�����С���������ļӹ������������������乤�յĸ������ܻ������ɻ���Ҫ�����ƽ̨�߱�ͼ�λ���̵�������������������ԭ���ֶ�ʾ�̵Ļ����ϣ�ͨ��ͼ�λ�����ʵ���Զ���̣����Ը��ӷ��㡢��ݵĽ������������
������2�����������ɶ�ֱ��������������˵��Ӿ���λ�����������Ӿ���λ������������ɶ�ֱ��������������˻������Զ����ϣ�������������ɶ�ֱ��������������˹���Ч���Լ��ظ���λ���ȣ��Լ�����ͨ���������Ӿ�����Զ�̿����м�ʱ���������ӹ�����������ͻ��״����
������3�������ɶ�ֱ�����������������δ�����������Эͬ�ӹ�ʵ�飬������������֤��Эͬ�ӹ������Ŀ����ԡ�
���������
����[1] ���㡣 ��ҵ�����˵ļ�����չ����Ӧ��[J]. ���ֻ��û��� 2017��28���� 45-46.
����[2] ��ʥ�ޡ� ��ҵ�����˵�Ӧ����״����չ[J]. ũ�Ҳ�ı�� 2019��23���� 137.
����[3] Iqbal J, Islam R U, Abbas S Z, et al. Automating industrial tasks through mechatronic systems-A review ofrobotics in industrial perspective[J]. Tehni?ki vjesnik, 2016, 23��3���� 917-924.
����[4] ��׳�� ��ҵ������"���ѽ���"?һ��α����[J].�й�ս�����˲�ҵ�� 2018��37���� 50-52.
����[5] Lin H I, Carvajal D H. Automatic following in a sheet metal bending process[C]//2016 InternationalAutomatic Control Conference ��CACS���� IEEE, 2016: 137-142.
����[6] Robla-Gómez S, Becerra V M, Llata J R, et al. Working together: A review on safe human-robotcollaboration in industrial environments[J]. IEEE Access, 2017, 5��26���� 754-773.
����[7] Vogel C, Fritzsche M, Elkmann N. Safe human-robot cooperation with high-payload robots in industrialapplications[C]//2016 11th ACM/IEEE International Conference on Human-Robot Interaction ��HRI���� IEEE,2016: 529-530.
����[8] Olaya S S P, Wollschlaeger M. Control as an industrie 4.0 component: Network-adaptive applications forcontrol[C]//2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation��ETFA���� IEEE, 2017: 1-4.
����[9] Jiang S, Fang H, He K, et al. Research on Obstacle Avoidance Path Planning Algorithm for Six-axisRobot[C]//2018 IEEE International Conference on Information and Automation ��ICIA���� IEEE, 2018:465-469.
����[10] Shao J, Luo D, Xu Y, et al. Cooperative Path Planning for Multiple Robots With Motion Constraints inObstacle-Strewn Environment[J]. IEEE Access, 2019, 7��132���� 286-301.
����[11] Das S D, Bain V, Rakshit P. Energy Optimized Robot Arm Path Planning using Differential Evolution inDynamic Environment[C]//2018 Second International Conference on Intelligent Computing and ControlSystems ��ICICCS���� IEEE, 2018: 1267-1272.
����[12] Lai T C, Xiao S R, Aoyama H, et al. Path planning and obstacle avoidance approaches for robotarm[C]//2017 56th Annual Conference of the Society of Instrument and Control Engineers of Japan ��SICE����IEEE, 2017: 334-337.
����[13] Yang K, Moon S, Yoo S, et al. Spline-based RRT path planner for non-holonomic robots[J]. Journal ofIntelligent & Robotic Systems, 2014, 73��1���� 763-782.
����[14] Nishi T, Mori Y. Energy Efficient Motion Planning of Dual-Armed Robots with Pickup PointDetermination for Transportation Tasks[C]//2018 IEEE International Conference on Industrial Engineeringand Engineering Management ��IEEM���� IEEE, 2018: 1401-1405.
����[15] Contreras-Cruz M A, Ayala-Ramirez V, Hernandez-Belmonte U H. Mobile robot path planning usingartificial bee colony and evolutionary programming[J]. Applied Soft Computing, 2015, 30: 319-328.https://doi.org/10.1016/j.asoc.2015.01.067. [16] Das P K, Behera H S, Panigrahi B K. Intelligent-based multi-robot path planning inspired by improvedclassical Q-learning and improved particle swarm optimization with perturbed velocity[J]. EngineeringScience and Technology, an International Journal, 2016, 19��1���� 651-669.
����[17] Kim H W , Chen H , Lee J M . Path planning of 5-DOF manipulator[C]// 2014 IEEE/ASME InternationalConference on Advanced Intelligent Mechatronics ��AIM���� IEEE, 2014, 877-881.
����[18] Ji M, Zhang L, Wang S. A Path Planning Approach Based on Q-learning for Robot Arm[C]//2019 3rdInternational Conference on Robotics and Automation Sciences ��ICRAS���� IEEE, 2019: 15-19.
����[19] Li Z, Ma H, Zhang X, et al. Path planning of the dual-arm robot based on VT-RRT algorithm[C]//2019Chinese Control Conference ��CCC���� IEEE, 2019: 4359-4364.
����[20] Yu J, Wu P, Yu N, et al. Research and implementation of robot arm task imitation system based onRNN[C]//2017 IEEE International Conference on Robotics and Biomimetics ��ROBIO���� IEEE, 2017:
����2484-2489.
����[21] X.G.HAN, M.YIN, X.G.LIU et al. Solution of Inverse Kinematics and Motion Trajectory Simulation for 6RRobot[J]. Journal of Sichuan University��Engineering Science Edition���� 2015, 47��6���� 185-190.
����[22] Jingyi Z, En L, Zize L. Random based narrow space path planning for arm manipulation with the fixedorientation constraints[C]//2016 Chinese Control and Decision Conference ��CCDC���� IEEE, 2016:5176-5179.
����[23] ��� ��־���� �����ޡ� �������������Ľ��Ŵ��㷨�Ļ����˹켣�滮[J]. ���켼���������2017��07���� 91-95.
����[24] �������� ��⡣ �����ֱ۹켣�滮[J]. ����ҵ�Զ����� 2015, 37��13���� 8-11.
����[25] ���ؠģ� ��ף���� ��⣬ ���Ʒɣ� �ܺ����� ���ڸĽ�ģ���˻��㷨�İ��˻�����·���滮[J]. �������������ƣ� 2018, 26��07���� 182-185.
����[26] ��쿣� ���Ʒ壬 �ƺ�ΰ�� �ȡ� ����һ�ָĽ�A*�㷨���ƶ�������·���滮[J]. ���ϴ�ѧѧ������Ȼ��ѧ�棬 2017, 44��4���� 94-101.
����[27] ��־�� ��־���� ���֥�� ���Ρ� �Ľ��˹��Ƴ������ƶ�������·���滮[J].�����������Ӧ�ã�2019,55��23���� 29-34.
����[28] ���¡� ������ĥ��ϵͳ���Ƽ����о�[D]. 2015.
����[29] Sun W, Liu C, Zhu J. A Remote Controlled Mobile Robot Based on Wireless Transmission[C]//2018 2ndIEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference��IMCEC���� IEEE, 2018: 2173-2176.
����[30] Sheludko V N, Putov V V, Putov A V, et al. Decentralized control of cooperative robotic system[C]//2016IEEE V Forum Strategic Partnership of Universities and Enterprises of Hi-Tech Branches ��Science.Education. Innovations���� IEEE, 2016: 15-18.
����[31] Putov A V, Ignatev K V, Kopichev M M. Infrared camera based robot position determening and controlsystem[C]//2016 2nd International Conference on Industrial Engineering, Applications and Manufacturing��ICIEAM���� IEEE, 2016: 1-4.
����[32] Teodorescu R M, Cioc I B, Vochin B A, et al. LabVIEW application used for remote control of a mobilerobot with xbee communication[C]//2016 8th International Conference on Electronics, Computers andArtificial Intelligence ��ECAI���� IEEE, 2016: 1-4.
����[33] Sundaram A, Gupta M, Rathod V, et al. Remote Surveillance Robot System--A Robust Framework UsingCloud[C]//2015 IEEE International Symposium on Nanoelectronic and Information Systems. IEEE, 2015:
����213-218.
����[34] Nádvorník J, Smutn? P. Remote control robot using Android mobile device[C]//Proceedings of the 201415th International Carpathian Control Conference ��ICCC���� IEEE, 2014: 373-378.
����[35] ��ΰ�� ���� ����ҵ�� �ȡ� ��������ͨѶ���ƶ�������Զ�̿���ϵͳ����ƺ�ʵ��[J]. ɽ����ѧ��2014, 27��6���� 52-57.
����[36] Fan J, Wang L, Chai T. Wireless network based operational optimization and control for a class ofindustrial processes[C]//2015 10th Asian Control Conference ��ASCC���� IEEE, 2015: 1-6.
����[37] �����ˣ� ��ϼ�� ����ABB�����˵�ң��������ϵͳ���[J]. �����Ӧ���о��� 2019, 36��12���� 3785-3787.
����[38] Wang K S, Hou Y, Xu Y Z. Design and Implementation of Remote Control System between Android Platform[C]//2016 International Conference on Information System and Artificial Intelligence ��ISAI���� IEEE,2016: 143-147.
����[39] Zhou B, Chou W, Wu S. Remote control system of mobile robot based on cloud platform[C]//2017 2ndInternational Conference on Robotics and Automation Engineering ��ICRAE���� IEEE, 2017: 94-98.
����[40] ������ �������� ����4G������ƶ�������Զ�̿����о�[J]. ���������� 2019, 18��11���� 71-74.
����[41] Su Y H, Hsiao C C, Young K Y. Manipulation system design for industrial robot manipulators based ontablet PC[C]//International Conference on Intelligent Robotics and Applications. Springer, Cham, 2015:27-36.
����[42] Trinh G, Copplestone G, O'Connor M, et al. Robotically assembled aerospace structures: Digital materialassembly using a gantry-type assembler[C]//2017 IEEE Aerospace Conference. IEEE, 2017: 1-7.
����[43] ���С� ����������ҵ�������ɶȻ�е����Ƽ��˶������о�[D]. �Ͼ��ʵ��ѧ�� 2018.
����[44] ���µ������磨�й�������˾�� ����AC�ŷ������������ʹ��˵���飨�ۺ�ƪ��[K]. 2018.
����[45] �̸߿Ƽ������ڣ�����˾�� GUS Controller ϵ���˶��������û��ֲ�[K]. 2015.
����[46] Ratiu M, Prichici M A. Industrial robot trajectory optimization-a review[C]//MATEC Web of Conferences.EDP Sciences, 2017, 126: 2005.
����[47] Mejri S, Gagnol V, Le T P, et al. Dynamic characterization of machining robot and stability analysis[J]. TheInternational Journal of Advanced Manufacturing Technology, 2016, 82��1-4���� 351-359.
����[48] Patil A, Kulkarni M, Aswale A. Analysis of the inverse kinematics for 5 DOF robot arm using DHparameters[C]//2017 IEEE International Conference on Real-time Computing and Robotics ��RCAR���� IEEE,2017: 688-693.
����[49] Sun J D, Cao G Z, Li W B, et al. Analytical inverse kinematic solution using the DH method for a 6-DOFrobot[C]//2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence ��URAI���� IEEE,2017: 714-716.
����[50] Petrescu R V, Aversa R, Akash B, et al. Inverse kinematics at the anthropomorphic robots, by atrigonometric method[J]. American Journal of Engineering and Applied Sciences, 2017, 10��2���� 394-411.
����[51] Lin H I, Carvajal D H. Automatic following in a sheet metal bending process[C]//2016 InternationalAutomatic Control Conference ��CACS���� IEEE, 2016: 137-142.
����[52] �ºơ� ���㲻ͬ��������Ļ���������·���滮�о���ʵ��[D]. �㽭��ҵ��ѧ�� 2016.
����[53] Ali S A, Annuar K A M, Miskon M F. Trajectory planning for exoskeleton robot by using cubic and quinticpolynomial equation[J]. International Journal of Applied Engineering Research, 2016, 11��13���� 7943-7946.
����[54] ?vejda M, ?echura T. Interpolation method for robot trajectory planning[C]//2015 20th InternationalConference on Process Control ��PC���� IEEE, 2015: 406-411.
����[55] Sommariva A, Vianello M. Polynomial fitting and interpolation on circular sections[J]. AppliedMathematics and Computation, 2015, 258: 410-424.
����[56] Bhowmick S, Mukhopadhyay J, Deb A K. Fast Path planning on planar occupancy grid exploiting geometryof obstacles[C]//2017 Ninth International Conference on Advances in Pattern Recognition ��ICAPR���� IEEE,2017: 1-6.
����[57] Zhang N, Zhang Y, Ma C, et al. Path planning of six-DOF serial robots based on improved artificialpotential field method[C]//2017 IEEE International Conference on Robotics and Biomimetics ��ROBIO����IEEE, 2017: 617-621.
����[58] Santiago R M C, De Ocampo A L, Ubando A T, et al. Path planning for mobile robots using geneticalgorithm and probabilistic roadmap[C]//2017IEEE 9th International Conference on Humanoid,Nanotechnology, Information Technology, Communication and Control, Environment and Management��HNICEM���� IEEE, 2017: 1-5.
����[59] Shen H. A study of welding robot path planning application based on Genetic Ant Colony HybridAlgorithm[C]//2016 IEEE Advanced Information Management, Communicates, Electronic and AutomationControl Conference ��IMCEC���� IEEE, 2016: 1743-1746.
����[60] Chen Y W, Chiu W Y. Optimal robot path planning system by using a neural network-basedapproach[C]//2015 international automatic control conference ��CACS���� IEEE, 2015: 85-90.
����[61] Nie Z, Yang X, Gao S, et al. Research on autonomous moving robot path planning based on improvedparticle swarm optimization[C]//2016 IEEE Congress on Evolutionary Computation ��CEC���� IEEE, 2016:2532-2536.
����[62] ��ǰ�̣� ����Ӣ�� ���ܽܣ� ���Ƴɡ� ���ڸĽ���ͳ�˹��Ƴ����Ļ����˱��Ϻ�·���滮�о�[J]. ��³��ҵ��ѧѧ���� 2019��06���� 53-58.
����[63] �¶����� ��÷���� ���ڸĽ��Ŵ��㷨�Ľ��˹��Ƴ����ĸ��ӻ������ƶ�������·���滮[J]. ��ѧ�����빤�̣� 2018, 18��33���� 79-85.
����[64] Chen S, Yang Z, Liu Z, et al. An improved artificial potential field based path planning algorithm forunmanned aerial vehicle in dynamic environments[C]//2017 International Conference on Security, PatternAnalysis, and Cybernetics ��SPAC���� IEEE, 2017: 591-596.
����[65] Ma C, Zhang Y, Zhao Q, et al. 6R Serial Manipulator Space Path Planning Based on RRT[C]//2016 8thInternational Conference on Intelligent Human-Machine Systems and Cybernetics ��IHMSC���� IEEE, 2016, 2:99-102.
����[66] Zhang H, Wang Y, Zheng J, et al. Path planning of industrial robot based on improved RRT algorithm incomplex environments[J]. IEEE Access, 2018, 6��53���� 296-306.
����[67] Song A, Si G. Remote monitoring system based on Zigbee wireless sensor network[C]//2017 29th ChineseControl And Decision Conference ��CCDC���� IEEE, 2017: 2618-2621.
����[68] Agajo J, Kolo J G, Obiaradimson I C, et al. REMOTE MONITORING AND AUTOMATED DIAGNOSISVIA INTERACTIVE SOFWARE INTERFACE USING WIRELESS COMMUNICATION NETWORK"TELEMEDICINE"[J]. ATBU Journal of Science, Technology and Education, 2016, 4��1���� 95-109.
����[69] Zhang Y, Liu H, Su X, et al. Remote mobile health monitoring system based on smart phone andbrowser/server structure[J]. Journal of healthcare engineering, 2015, 6��4���� 717-738.
����[70] Filguiera R, Krause A, Atkinson M, et al. dispel4py: A Python Framework for Data-Intensive ScientificComputing[J]. International Journal of High Performance Computing Applications, 2017, 31��4���� 316-334.
����[71] �ƴ�»�� ����Python��MYSQL���ݿ���ʼ���[J]. �ִ���Ϣ�Ƽ��� 2017, 1��4���� 73-75.
����[72] Raschka S. Python machine learning[M]. Packt Publishing Ltd, 2015.
��л
�������³��ӣ�������Ϣ�����ݵ������о���ѧϰ�������������ʽ������ᡣ�������ʣ����Ҷ����ǽ���һ��ȫ�µ�ѧ�����ã�ټ���У��Ũ���ѧ����Χ�Լ�ӵ�к���麣��ͼ��ݡ��ҷdz���л��Щ���о����γ�ѧϰ�У����ֹ���ÿһλ�ڿ���ʦ�����������Ҹ��ӽ��������������"��º��㡢��������"��Уѵ����ҲҪ��л��ЩΪ�ҿ����о����������ҵ��ˣ������������ǣ������Ҹ��������������Լ���ѧϰ������о����ݣ��Լ����з���Ҳ�ܸ�л���Dz����䷳��Ϊ�ҽ��������о������������Ĵ�С���⣻ѧϰ�ĵ�·����Ȼ�������İ���������Ļ�����Щ����ͬ�еĻ�顣�Һܸ���������ѧϰ���������������ѡ���ʶ��ͬѧ�ͽ��������ѣ����������ҳ�Ϧ�ദ����ͬ����ѧϰ�����е��ջ�������Ǹ��Ҵ����˴���Щ����ʱ��������֣����ҵ�������¿ɻ��ף����䡣
��������ֿ�ĸ�л��Ҫ���ҵ��о�����ʦ�������ڡ������������ʦ������ÿ���ڿ����ϸ��㽲��֪ʶ����Ҳ������ʦ�������Կκ��ѧϰ���Ų��ʡ���������һλ�ҳ���ʱ��ʱ�Ĺ������ѧϰ��չ����������ʱ������һ����ָ����������ãʱ���ָ������һյ���ơ�ͬʱ������ʦ�ڹ���֮�࣬Ҳ�dz��������ǵ����Ϊ�˷ḻ���ǵĿ����������ʦҲ��ʦ�ֵ��Ǿ���һ��ۻᣬ�μӻ����ʦ�Ÿ���������ۡ�ֵ���������֮�ʣ��ٴ�������ʦ���������Եľ���ͳ�ֿ�ĸ�л��
�����������ҲҪ��л�꾰����ʦ���ҹ����о����ڼ��ṩ����˽������ָ������л�����������ʦ�֡������ʦ�֡���ԣ��ʦ�֣�ͬ���Ϸ���������ȫ���Լ�ʦ������������«�����������ѡ������С�֣�ε�һ·���Ͱ������������ʵ����ѧϰ������������Ȥ��
��������һ�Ҫ��л�ҵĸ�ĸ�ͼ��ˣ���л���Ƕ���ѧҵ�������֧�֣�������ѧϰ���������������ǣ����������ഺʱ�⡣
�����ڼ�����ҵ֮�ʣ��ٴ����ĵظ�лһֱ��������������ҵ����ѡ���ʦ��ͬѧ�ǣ�
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��