24小时论文定制热线
24小时论文定制热线
摘要
中医按摩机器人是一款以中医推拿理论与先进机器人控制技术相结合的服务型机器人,能够智能模仿技师的手法动作对人体特定部位进行按摩,具有重要的研究意义。传统的按摩机器人动作单一、形体较大、刚性较高,过高的刚性虽然位置控制精确,但是会让消费者无法信任机器的安全性。随着软体机器人的发展,柔性材料在医疗领域得到应用,此材料柔顺性好,但是自由度高,难以实现精确的位置控制。本文以五种中医按摩手法参数为基础,研制一款由柔性驱动器驱动,刚性关节构成,柔性材料包裹,刚柔结合的气动按摩机械手爪,研究内容如下:
首先,本文综述了国内外按摩机器人的研究现状,分析了课题的研究意义和现有研究存在的不足。以按、振、揉、推、捏拿五种按摩手法参数和人手标准尺寸为基础,利用气动肌肉柔性驱动器,结合高分子硅胶材料,设计一款具有变刚度功能的气动按摩手爪,并制定出机械和控制系统的总体设计方案。
其次,根据机械系统的设计方案,对按摩手爪的三个关节进行结构设计、建模与装配,完成虚拟样机建立,并对零部件进行了静应力分析。选择硬度适中的硅胶作为手掌气囊和硅胶手指的制作材料,通过单轴拉伸试验得到了材料的 Yeoh 二阶模型参数。利用有限元软件对掌、指模型的变形进行仿真分析,确定了气囊的壁厚参数,且验证了手指的结构强度。根据真空阻塞原理实现手掌气囊的变刚度,在柔软特性基础上提高了手掌承载力,同时利用模具浇筑的方式对掌、指部件进行制作,完成了样机的装配。
再次,利用 D-H 坐标法完成了捏拿手指结构的运动学分析,得到连杆参数与末端执行装置空间位姿之间关系,并利用 MATLAB 对其进行仿真,验证了结构的可行性。通过拉格朗日动力学方程完成捏拿手指结构的动力学建模,得到了关节力矩与位置、速度、加速度之间关系,为机械系统的运动控制编程提供理论依据。
最后,完成按摩手爪控制系统中硬件和软件的设计,对整体进行样机组装和功能调试,通过压缩刚度和手法力度测量实验,测试了手掌气囊的变刚度性能,得到了手法力度与气压的关系,并确定合理的气压范围,为实际运用提供参照。
关键词;按摩机械手爪,结构设计,柔性驱动器,仿真分析,运动学
Abstract
Chinese medicine massage robot is a service robot that uses Chinese massage theorycombined with advanced robot control technology. It can intelligently imitate the technician'smanual actions to massage specific parts of the human body, which has important researchsignificance. The traditional massage robot has a single action, a large body, and a highrigidity. Although the position of the excessive rigidity is accurate, it will make consumersunable to trust the safety of the machine. With the development of soft robots, flexiblematerials are used in the medical field. This material has good flexibility, but it has a highdegree of freedom and it is difficult to achieve accurate position control. Based on theparameters of five Chinese massage techniques, this article develops a pneumatic massagemanipulator claw driven by a flexible drive, composed of rigid joints, wrapped with flexiblematerials, and combined with rigid and flexible. The research contents are as follows:
Firstly, this article summarizes the research status of massage robots at home and abroad,analyzes the research significance of the subject and the existing research deficiencies. Basedon the five massage technique parameters of pressing, vibrating, kneading, pushing andpinching and the standard size of the human hand, using a pneumatic muscle flexible drivercombined with polymer silicone material to design a pneumatic massage claw with variablestiffness, and formulate the overall design scheme of machinery and control system.
Secondly, according to the design scheme of the mechanical system, the three joints ofthe massage claw are designed, modeled and assembled, the virtual prototype is established,and the static stress analysis of the components is carried out. Choose the silicone withmoderate hardness as the material for making the palm airbag and silicone fingers, and obtainthe Yeoh second-order model parameters of the material through the uniaxial tensile test. Thedeformation of the palm and finger models was simulated and analyzed using finite elementsoftware to determine the wall thickness parameters of the airbag and verify the structuralstrength of the fingers. The variable stiffness of the palm airbag is realized according to theprinciple of vacuum blocking, and the palm bearing capacity is improved on the basis ofsoftness. At the same time, the palm and finger parts are manufactured by the mold castingmethod, and the assembly of the overall prototype is completed.
Thirdly, using the method of D-H coordinate to complete the kinematics analysis of thepinch finger structure to obtain the relationship between the link parameters and the spaceposture of the end effector, and the feasibility of the structure is verified by MATLABsimulation. The dynamics modeling of pinching finger structure is completed by Lagrangedynamics equation, and the relationship between joint torque and position velocityacceleration is obtained, which provides a theoretical basis for the motion controlprogramming of the mechanical system.
Finally, completed the design of hardware and software in the massage claw controlsystem, assembled the prototype and functional debugging of the whole, and tested thevariable stiffness performance of the palm airbag through the compression stiffness andmaneuver strength measurement experiment, and obtained the relationship between themaneuver force and air pressure, and determine a reasonable pressure range, for the actual useof reference.
Key Words: Massage manipulator, Structural design, Flexible actuator, Simulation analysis,Kinematics

目录
第 1 章 绪论
1.1 引言
当今随着科技的飞跃进步,智能机器人技术也得到了质的提高。机器人已经不再局限于工业领域的应用,在医疗、服务、教育、交通、通讯等领域也得到了广泛的应用。机器人的种类有很多,比较常见的有工业机器人、服务型机器人、水下机器人、军用机器人、康复机器人、仿生机器人、软体机器人、微型机器人等,伴随着人工智能技术不断的发展,机器人也越来越趋向于智能化、标准化、网络化、模块化[1].由于生活节奏的加快和服务行业市场需求量的增加,服务型机器人作为机器人领域的一位年轻成员已经得到广大消费者和学者们的关注。服务型机器人是一种不包括从事生产设备,半自主或全自主工作的机器人,着眼于改善人们生活的质量和缓解人们工作的压力。目前应用的领域主要涉及医疗、运输、救援、监护、清洁等工作领域,服务机器人与人们的工作和生活有着密切关系,它的发展将成为未来现代化服务领域重要的组成部分[2-3].
按摩机器人是服务型机器人的一种,与其他按摩设备不同的是中医按摩机器人是以传统的中医推拿理论为基础,结合先进的设计理念和控制技术,涉及多学科多领域的高科技产品。如今出现的按摩机器人,大多为刚性结构,虽然能够实现精确的位置控制,对按摩区域完成相应的手法动作,但是整体刚性较高,消费者依然无法完全信任按摩的安全,因此大多依然处于试验研究状态。随着柔性材料在医疗领域的研究与利用,刚性结构柔性不足的问题得以改善,但是单纯的柔性结构难以得到较好的控制,因此有必要研究一款刚柔结合的机器按摩装置,将柔性材料与按摩机器人结合,加快中医按摩机器人的市场化,缓解按摩技师的压力,满足中老年人的健康需求。
1.2 课题研究的背景和意义
1.2.1 研究的背景
随着科学技术的进步和人们生活水平的提高,中国作为人口大国老龄化问题日益严峻,从图 1.1 我国未来 65 岁以上人数变化趋势可得,截止 2018 年我国 60 周岁及以上人口数占据总人口数 17.9%相比于 2017 年增涨 0.6%,预计未来 20 年内中国老年人口数将增加一倍将超过 20%,老龄化问题将成为我国未来发展的巨大挑战,养老产业逐渐成为了人们关注的焦点[4].
老龄化问题日益严峻不仅给人们生活带来压力而且对养老产业带来巨大挑战,其中在医疗保健、医疗护理、家政服务等需求量快速增加。当人们年龄不断增加,老年人会出现常见的疾病,这些都会影响他们的日常生活,另外我国老年人服务与健康保障体系发展尚未完善,加剧了老年人养老问题难度,也给年轻人带来了负担[5].因此,积极的开展中老年人的医疗、护理保障工作并大力推动老龄化产业发展,有利于缓解老龄化带来的养老问题。随着科技发展方向在各个行业内转型,机器人行业内科学家们已将重心转向服务领域,服务型机器人技术得到了快速发展,其中医疗康复机器人也获得了人们极大地关注。
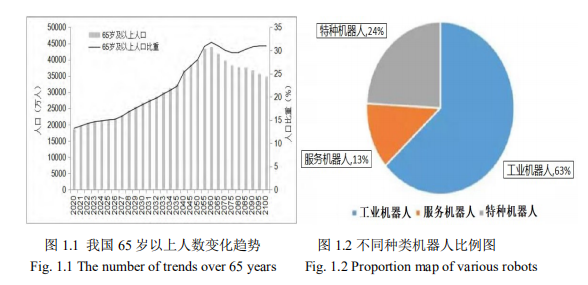
按摩机器人是一款具有代表性的服务型机器人,它是传统的中医按摩手法与现代医疗康复、智能技术、智能感知技术及机器人控制技术领域相互渗透、结合的高科技产物。它可以模仿按摩师相应的手法动作,对人体特定部位进行按摩,以减轻按摩师数量和精力方面的负担,在当前社会人口老龄化趋势下,机器代替技师按摩是对当前医疗康复市场中消费者需求的回应。如图 1.2 所示,未来随着传感器技术的发展,5G技术的应用,人工智能技术的融入,以及新型材料技术的发展,智能化服务型机器人将会应用到人们生活的各个领域。
1.2.2 研究的意义
中医按摩又称为"推拿",是我国传统医学领域的重要结晶之一,也是人们重要的医疗保健方式之一,被公认为一种平稳可靠,安全有效并且对人体无毒、副作用纯净的物理医疗手法[6].中医按摩治疗是以传统的中医经络学为理论基础,结合西方的解剖学、生理学等理论。通过手或者身体的其他部位对按摩者体面特定穴位施加一定的循环力量,来刺激人体的穴位,调节人体的运动、循环及生理系统,最终达到疏通脉络,活动关节,正气活血,消除症状,治疗疾病,提高免疫,加速恢复,强生健体的功效[7-8].
甚至对心血管疾病、消化系统疾病、关节肌肉损伤、腰椎间盘突出、颈椎病等老年人常见问题具有较好的治疗效果,所以为广大国内外患者所接受和欢迎[9].
但是随着老龄化不断加剧,消费者对中医按摩需求量也不断增加,这对按摩师的体力和数量提出了强烈的挑战,并且按摩的效果与按摩师的经验以及手法的力度、位置、时间、频率都有很大的关系,目前市场上有经验的按摩师数量已经不能满足持续增涨的消费者需。随着机器人技术的不断提高,机器按摩得到了学者们的关注和重视,按摩机器人逐渐成为了这一领域的代表作品。
目前市场上大多数刚性的按摩器材,是一种被动式、挤压式按摩,并且手法单一、体积较大、控制复杂。刚性结构的优点在于精确的位置控制,但是按摩是一种人机交互的形式,过高的刚性使消费者还是无法完全信任按摩的安全以及按摩的效果。随着软体机器人的发展,柔性材料在医疗领域得到了应用,此材料在外界环境变化时会产生形变,利用形变力驱动负载运动,具有较好的柔顺性和灵活性,但是由于自身的非线性强、自由度高,很难实现精确的位置控制[10-11].
综合上述原因,本文将基于中医按摩手法要领,设计一款由柔性驱动器驱动,刚性关节构成,柔性材料包裹,刚柔结合的机械按摩手爪。按摩手爪安装在六自由度 UR柔性机械臂上,实现对人体主动式、中医式按摩。利用刚性机械臂精确位置控制,结合柔性材料本身的柔韧性好、自由度高以及能够更好地适应复杂结构的特点,在保障机器人能够与人体安全接触的同时实现按摩师的手法动作。从而推进柔性材料在按摩机器人方面的应用,减轻用户对机器人的畏惧心理,加快按摩机器人的市场化,以满足消费者需求,缓解技师在人数和精力上的压力,具有重要的市场价值和研究意义。
1.3 按摩机器人国内外研究现状
1.3.1 国外研究现状
国外从 20 世纪 90 年代开始,以日本、美国、韩国、新加坡和中国等国家为代表的相关机构或团队陆续的对按摩机器人的机构和控制方面开展研究工作,到目前为止也陆续取得了许多阶段性的科研成果。
1996 年,日本三洋电机有限公司机电一体化研究中心的 Masao Kume 等人研发了一款机械疗法单元 MTU(Mechanotherapy Unit),按摩机器的手部有 4 个自由度,可以对人的肩、颈部的肌肉进行拿捏按摩动作[12],如图 1.3 所示。此款按摩机器人是学者们早期的研究成果,机器的按摩手法较为单一,并且柔性不高,但是研究的结果验证了机器按摩的可行性,表明了机器按摩已经得到了学者们的关注,这也为今后的深入研究奠定了一定的理论基础。
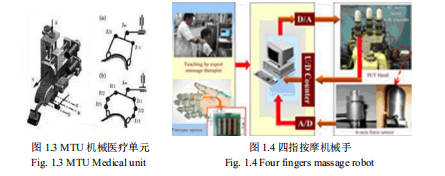
2006 年,日本丰桥科技大学和日本科学家 Panya Minyong,等人设计了一款仿人多手指按摩机械手[13].如图 1.4 所示,该机械手有 4 个手指,13 个自由度,利用分布式压力传感器制成数据"手套",采集技师按摩过程的手指压力数据,再通过 6 维力传感器闭环的位置和力的控制,最终实现技师手指间的力度复现。
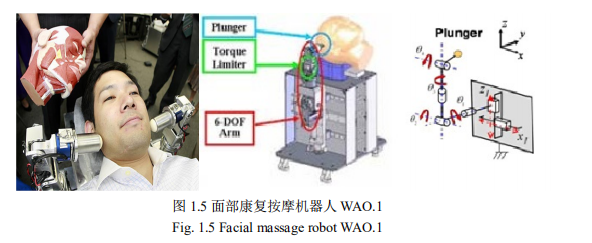
2007 年,日本早稻田大学和科学家 Atsuo Takanishi 等人研发了一款对人体面部可以实现揉、按动作的康复机器人 WAO.1,如图 1.5 所示。机器结构具有 6 个自由度,机械手与人体接触的地方为可替换的按摩头,两边机械臂上安装可以检测摩擦力的力矩限制器,当摩擦力小于设定值时,上位机将会控制扭矩限制器提高摩擦力,反之将会限制摩擦力,具有一定的安全保护措施[14].但是该款机器按摩的部位较为局限,按摩手法单一,实用性不高,因此未能得到有效的推广。
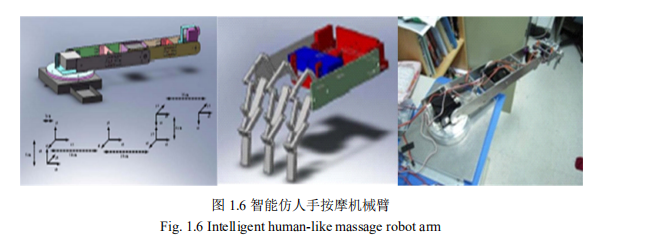
2010 年,台湾逢甲大学 Chih-ChengPeng 等人研发了一款具有 5 个自由度的机械手臂和具有 4 根仿人手指的机械手,可以实现中医按摩手法中的按、揉和拿 3 种手法[15],如图 1.6 所示。这款按摩机器人装有 CCD 摄像头,通过视觉系统识别按摩技师手部的标记,从而获得精确的按摩位置。此外,机器人安装生理信号检测系统,用于检测用户的心率、体温、呼吸频率等相应参数,进而获得用户在按摩过程中的生理反应,具有一定的智能性,但是机器整体刚性较高,形体较大,工作范围较小。
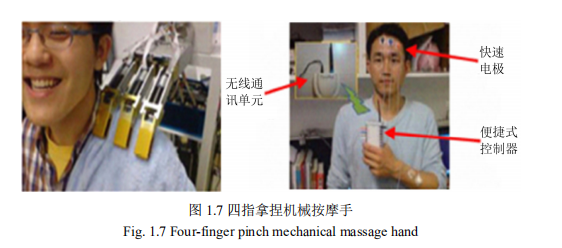
2010 年,国立台湾大学的 Ren C.Luo 和 Chih C.Chang 等人设计了一款按摩机械臂,如图 1.7 所示,末端机械手具有 4 根手指,8 个自由度,可以实现中医按摩中的"拿捏"手法[16],如图 1.7 所示。按摩过程中通过传感器采集用户身体的肌肉电信号,通过分析这些电信号获得用户的按摩感受,并反馈给控制器来调节机械手的输出力,保证有效的按摩力输出,同时也确保按摩过程的安全。
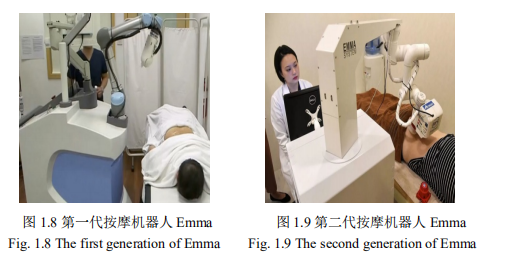
2016 年,南洋理工大学协助 Albert Zhang 等人研发了一款主打中医按摩推拿的机器人 Emma[17].第一代 Emma 如图 1.8 所示,金属手臂的一端装有仿人手掌和手指的硅胶按摩头,并且具有加热功能,主要采用指压和物理疗法,对人体的背部和膝盖进行按摩。Emma 搭载立体显示相机能够对人体穴位精确定位,并通过对中医筋脉等大数据的学习不断地智能化。Emma 还配备多种传感器,通过把病人的诊断的结果传达到云端进行在线专家处理,从而使得医生实时准确的了解病人的康复情况。Emma2.0和 3.0 比第一代按摩机器人的体型更加小巧,如图 1.9 所示,Emma2.0 机械臂有 6 个自由度,相比于传统的按摩器械灵活度更高,内部装载了多种按摩程序,利用先进的传感器技术来测量人体肌肉的软硬程度以及血液的流动程度,利用反馈技术能够精准控制按摩的力度和动作,通过人工智能系统为消费者确定最佳的按摩策略,但是机器的研发成本较高,控制比较复杂。
1.3.1 国内研究现状
国内对按摩机器人的研究起步相对较晚,在 2008 年以前还停留在理论分析和实验研究阶段。在国家 863 计划的支持下将中医按摩机器人列为第二批重点的项目。2010年到 2011 年期间国家自然基金又对按摩机器人相关的多个项目进行了资助,特别是江苏大学,山东建筑大学,北京理工大学等科研单位对中医按摩机器人的开展研究,完成了中医按摩机器人样机的研发。
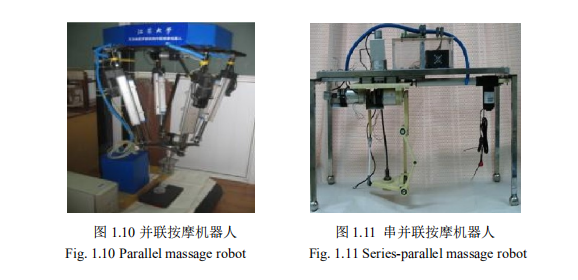
2004 年,江苏大学马履中教授和他的团队研制了一款混合型机构的医用按摩机器人[18-20],如图 1.10 所示。这款机器人主体是以一个具有 5 自由度的并联机构,能够实现中医按摩中揉、按、推的手法,整体刚性高、动态性能好、末端惯性小、位置精度高。但是并联机器人自由度多,控制复杂,工作空间较小,针对这些缺点,马教授团队又展开了对串并联混合型机构的按摩机器人研制,如图 1.11 所示。该款机器人利用串联结构进行快速穴位定位,通过并联执行装置完成按摩手法动作,充分发挥了串并联机器人两者各自的优势,但是按摩机器人的执行端形体粗重,结构复杂,所以依然停留于实验室研究状态。
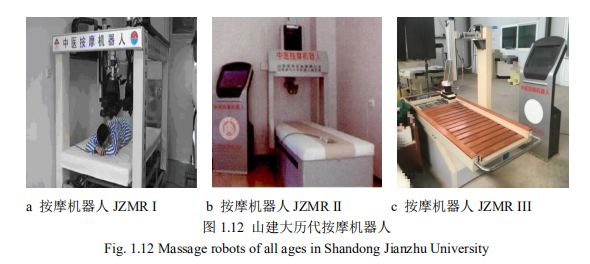
2008 年,山东建筑大学鲁守银教授团队与智能系统研究院,在国家"863"计划的支持下开展了对中医按摩机器人的研究,先后完成了 JZMR I 和 II 型中医按摩机器人从理论到样机的研制[21],如图 1.12(a)和(b)所示。JZMR I 采用双臂设计,每个机械臂的末端安装 5 指按摩仿人机械手,可以实现指柔、指按、掌揉、掌按、捏拿、滚压、振颤、叩击等按摩手法动作[22],该按摩机器人通过机器视觉技术识别人体背部的穴位标识进行精确定位,通过传感器获取用户按摩过程中的血压、心率、体温等生理指标,根据这些指标判定用户的按摩效果,并决定是否继续按摩[23],但按摩手刚性较高,实用性小。2010 年,为了提高实用性,以及市场化,鲁守银教授的团队在前一代的基础上研制出了一款单臂中医按摩机器人[24],2015 年进行了第 3 代样机的研制,此款机器的结构和功能在前者的基础上又进行了改进,样机如图(c)所示。
2008 年,我国多所大学联合研发了一款中医按摩机器人,如图 1.13 所示,该款按摩机器人具有一个 4 自由度的机械臂,末端的按摩装置是一个 3 自由度的仿人按摩手,可以完成点按、指揉、捏拿、滚压和叩击 5 种按摩手法[25-26].机器各关节通过闭环控制器来实现力矩和位移的控制,基于遗传算法计算出最优 PID 控制参数值,通过最小二乘法完成参数调整,实现稳定的力量输出。

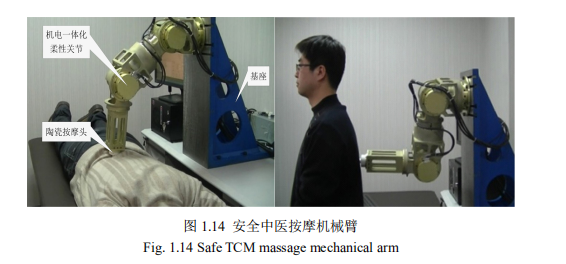
2014 年,北京理工大学智能机器人研究所的黄远灿教授团队研制一款具有 4 自由度的中医按摩机械臂,能够完成点按、指揉、弹拔三个按摩手法动作,可以完成卧式和坐式两种按摩方式,如图 1.14(a)、(b)所示,该款按摩机械臂由手臂、按摩头和基座组成,为了提高系统的安全性,采用轻量化连杆和机电一体化柔性关节设计方法[27],机械臂的长度与人的手臂相仿。通过具有弹性单元的一体化关节,建立关节处的力矩闭环,从而降低电机的惯量,提高关节的柔性。机械臂的力矩、阻抗控制是通过采集专家按摩手法生物力学参数,实现最优的控制,并对关节进行力矩标定,提高系统整体的安全性。
综上所述,机器按摩已经得到了国内外学者们的密切关注,也相继取得一定的科研成果,但是依然存在着不足:
(1)机器人技术未能与按摩理论充分结合。国外的按摩机器人研究起步比较早,特别是在按摩机器人的运动控制、力控制、机器视觉等方面要领先于国内,但是在机械结构部分较为单一。中医推拿作为我国传统中医学重要组成部分,国内学者对按摩的手法动作和作用机理研究深入,特别是在机器人的执行机构设计和手法实现方面研究较多,但是在机器人控制方面依然有所不足。
(2)形体较大,刚性较高。为实现按摩的手法动作,并且要达到按摩的强度,传统的按摩器材大多比较粗重,且刚性较高,是一种被动式、挤压式按摩,消费者依然无法完全接受按摩的效果和信任按摩过程的安全。
(3)成本较高,未能广泛使用。目前国内外研发的按摩机器人虽然都取得了丰富的成果,但是研发成本都较高,大多数按摩机器人依然停留在实验室研究阶段,市场上应用较多的依然是传统的按摩椅和按摩床等器械。因此,有必要设计一款符合市场和消费者需求实用型的按摩机器人。
1.4 本文主要研究内容
本文以按摩手爪的机械结构设计、模型的仿真分析、运动学和动力学建模、控制系统的搭建、整体样机的测试等为主要研究内容,针对目前传统刚性按摩器材柔性不足的问题,将以中医按摩手法参数为出发点,基于气动肌肉柔性驱动器,结合高分子硅胶材料,设计一款结合 UR 机械臂可以实现按、揉、推、振、捏拿按摩手法功能的气动按摩机械手爪,具体内容如下:
第一章、课题研究综述。介绍了课题的研究背景和研究意义,概述了国内外按摩机器人的研究现状,并通过比较和分析,得出当前存在的不足,以此作为课题研究的方向,最后介绍本文的主要研究内容。
第二章、按摩手法分析及总体设计方案。对常见中医按摩手法的作用机理、动作要领、施术部位、以及手法力度、频率、时间进行总结归纳,依据手法参数以及功能要求拟定按摩手爪的机械结构和控制系统总体设计方案。
第三章、按摩手爪结构设计及部件制备。根据机械结构总体设计方案,对按摩手爪的腕、指、掌三个关节的进行建模。针对捏拿手法,对原先结构进行改进,建立虚拟样机。为了选择手掌气囊壁厚参数以及验证手指结构强度,利用有限元软件对掌、指模型进行仿真分析,最后完成零件的加工和样机的组装。
第四章、按摩手爪运动学和动力学分析。运用 D-H 坐标法完成按摩手爪的捏拿手指结构正、逆运动学分析,得出关节参数与末端关节位置之间的关系,并运用 Matlab进行了仿真,验证结构的合理性和可行性,为捏拿手指结构的运动控制编程提供理论基础。最后利用拉格朗日方程式推导出此结构的动力学方程,为以后手指按摩力度的控制提供理论依据。
第五章、按摩手爪控制系统的设计。根据控制系统总体设计方案,对按摩手爪控制系统的硬件部分进行选型和接线,对软件分部进行设计和编辑,主要包括电气回路的设计、硬件的选型及接线、传感器信号的采集、通讯模块的连接、主程序的编辑、上位机手机软件的设计等。
第六章、按摩手爪调试及实验研究。对按摩手爪样机进行组装和调试,并搭建实验平台对其进行功能测试,主要包括手掌变刚度功能的验证以及按、振手法输出力测量实验,通过实验对按摩手爪的功能进行验证,并且研究手法力度与气压之间的关系,为实际的运用提供参照。
第 2 章 按摩手法分析及总体方案设计
2.1 中医推拿常用手法分析
2.1.1 推拿疗法作用机理
2.1.2 常用推拿手法动作要领分析
2.2 按摩手爪机械结构方案设计
2.2.1 按摩手爪结构设计要求
2.2.2 按摩手爪的工作原理
2.2.3 驱动方式的选择
2.2.4 执行器件的选择
2.2.5 手掌变刚度方案
2.3 按摩手爪控制系统方案设计
2.3.1 控制系统设计要求
2.3.2 控制系统方案分析
2.4 本章小结
第 3 章 机械按摩手爪结构设计及样机制备
3.1 按摩手爪结构设计与建模
3.1.1 振动腕关节设计与建模
3.1.2 伸缩手指关节设计与建模
3.1.3 柔性手掌关节设计与建模
3.1.4 捏拿手指关节设计与建模
3.2 零件应力分析及虚拟样机建立
3.2.1 关键零部件应力分析
3.2.1 按摩手爪装配体模型
3.3 手掌气囊及硅胶手指的制作
3.3.1 制作材料的选择
3.3.2 掌、指模型的仿真分析
3.3.3 掌、指模具的设计
3.3.4 掌、指实物的制作
3.4 按摩手爪样机装配
3.5 本章小结
第4章按摩手爪运动学和动力力学分析
4.1 捏拿手指结构运动学分析
4.1.1 关节坐标系建立
4.1.2 正运动学分析
4.1.3 逆运动学分析
4.2 捏拿手指结构运动学仿真
4.3 捏拿手指结构动力学分析
4.3.1 拉格朗日动力学模型
4.3.2 捏拿手指结构动力学模型
4.4 本章小结
第5章按摩手爪控制系统的设计
5.1 控制平台总体设计框架
5.2 气动执行系统设计
5.2.1 气动回路及工作原理
5.2.2 气路元件选型
5.3 电路控制系统实现
5.3.1 硬件控制原理
5.3.2 电路硬件选型
5.3.3 系统硬件的接线
5.4 控制系统程序设计
5.4.1 控制器主程序设计
5.4.2 传感器数据检测
5.4.3 上位机软件设计
5.5 本章小结
第 6 章 按摩手爪调试及实验研究
6.1 按摩手爪样机的组装及调试
6.2 按摩手爪的实验研究
6.2.1 手掌变刚度功能的验证
6.2.2 按、振手法输出力测量
6.3 本章小结
第 7 章 结论与展望
本文结论
本文通过比较和分析国内外按摩机器人的研究现状,针对当前传统的按摩器械功能单一、柔性不足、形体较大的问题,以五种常用的中医按摩手法参数为基础,利用气动肌肉柔性驱动器,设计一款能够实现按、振手法功能的柔性按摩手爪。首先介绍了按摩手爪的本体结构设计,对关键零件进行应力分析,利用有限元软件对掌、指模型的变形进行了仿真分析。然后针对捏拿动作,建立了捏拿按摩手爪虚拟样机,对手指结构进行了运动学分析和动力学建模。最后完成了零部件的加工制备和控制系统的设计,研制出整体样机,并通过压缩刚度和输出力测试实验对系统的性能进行了验证。
论文完成的工作和得出的结论如下:
(1)本文通过对按、振、揉、推、捏拿五种常见中医按摩手法的动作要领和作用机理的分析,归纳出手法动作的力度、频率、作用部位、作用时间等参数要求,根据这些参数研制出一款利用气动肌肉柔性驱动器驱动,结合超弹性硅胶材料,具有变刚度功能的气动按摩机械手爪,经过样机的装配和调试,能够实现按、振手法动作,并且手法力度可测、频率可调。
(2)根据按摩手爪机械系统整体设计方案对三个关节的结构进行了设计、建模与装配,建立了虚拟样机,并对零部件进行了强度验证。通过有限元软件对掌、指模型的变形进行仿真分析,首先选择 shore A30 硬度硅胶作为本体制作材料,然后通过单轴拉伸试验确定了 Yeoh 二阶模型的参数值,最后根据仿真结果得到了手掌气囊 3mm 的最优壁厚参数,并验证了模型在 0~4Kg 载荷下形变能力及结构强度满足实际需求。按照硅胶产品的制作要求,对掌、指的模具进行设计和加工,采用模具浇筑的方式完成手掌气囊和硅胶手指的制备,并通过负压阻塞原理实现掌部刚度可调。
(3)针对捏拿手法动作,在原有的结构基础上进行改进,建立了捏拿按摩手爪虚拟样机,运用 D-H 坐标法对捏拿手指结构进行运动学分析,得到了连杆参数与末端执行装置空间位姿之间的关系,利用 MATLAB 软件验证了结构运动学的可行性和有效性,并通过拉格拉日动力学模型完成此结构的动力学建模。为整体系统的运动控制编程提供理论依据。
(4)通过对按摩手爪的控制系统进行电气回路设计、硬件选型及接线、控制器编程以及上位机软件设计,完成了对按摩手爪的执行部件运动控制。并搭建了压缩刚度和手法力度测试平台,对手掌气囊变刚度的性能进行了验证,根据实验数据可得,当气囊内气压达到-80Kpa 时,可将掌部的轴向刚度提高约 4.7 倍。根据按、振手法输出力测量数据,获得了手法力度与气压关系,达到了中医按摩手法力度要求,并对手法力度进行等级划分,便于机器的实际使用。
课题展望
本文设计的第一代中医按摩机械手爪已经能够实现常见的推拿手法动作以及满足手法的力学要求,第二代中医按摩机械手爪完成了机械部分的设计,但是控制系统还未完善,考虑到如何实现更加拟人化的手法,以及加快推进机器按摩的市场化,未来的还需对以下两个方面展开深入研究:
(1)在按摩手爪的控制系统方面:由于本课题时间的限制,未能对控制算法进行研究,为了实现更加智能、稳定、可靠的控制策略,需要研究控制算法。
(2)在按摩手爪的功能实现方面:此外,结合机器视觉实现对人体背部穴位的进行定位,提高寻位的准确性。利用传感器技术采集消费者按摩过程中的生理反馈信息,将其与专家系统的生理参数进行比较,对按摩效果进行评价。
参考文献
[1] 陶永,王田苗。智能机器人研究现状及发展趋势的思考与建议[J].高技术通讯 2019,29(2):149-163.
[2] 李光林,郑悦,吴新宇等。医疗康复机器人研究进展及趋势[J].中国科学院院刊,2015,30(6):793-802.
[3] 王田苗,陶永。服务机器人技术研究现状与发展趋势[J].中国科学:信息科学,2012,42(9):1049-1066.
[4] 翟振武,刘雯莉。人口老龄化:现状、趋势与应对[J].河南教育学院学报,2019,38(6):15-22.
[5] 李臣。一种中医按摩机器人控制系统的研制[D].山东建筑大学,2017.
[6] 严隽陶。推拿学[M](第二版)。北京,中国中医药出版社,2009.
[7] 王先滨。中国古代推拿按摩史研究[D].黑龙江中医药大学,2009.
[8] 蒋玲芳。中医推拿和西方按摩[J].浙江中医学院学报,2001(1):63-64.
[9] 冯金升。推拿疗法的作用机理[J].推拿与引导。2001(17):4-5.
[10] 王田苗,郝雨飞。软体机器人:结构、驱动、传感与控制[J].机械工程学报,2017,53(13):1-13.
[11] 文力,王贺升。软体机器人研究展望:结构、驱动与控制[J].机器人,2018,40(5):577.
[12] Masao K, Morita Y. Development of a mechanotherapy unit for examining the possibility of anintelligent massage robot[C]. IEEE Intelligent Robots and Systems,1996:346-353.
[13] Panya M Y, Takanori M, et al. Expert Massage Motion Control by Multi-fingered Robot Hand [C].
IEEE Intelligent Robots and Systems,2003:3035-3040.
[14] Hiroki K, Yuichi U, Masao M, et al. Development of oral rehabilitation robot for massagetherapy[C].IEEE 6th International Special Topic Conference on JTAB, 2007: 111-114.
[15] Chih-Cheng P, Thong-Shing H, et al. Development of intelligent massage manipulator andreconstruction of massage process path using image processing technique[C]. IEEE Conference onRobotics, Automation and Mechatronics, 2010: 551-556.
[16] Luo R C, Chang C C. Electromyographic signal integrated robot hand control for massage therapyapplications [C]. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010:3881-3886.
[17] ConceptCentral, conceptnewscentral.com.去新加坡吧,感受一下按摩机器人的铁臂柔情[J]. 投资圈,2017,(第 11 期)。
[18] 马履中,王劲松等。基于一种新型并联机构的中医推拿机器人[J].中国机械工程,2004(16):69-72.
[19] 马履中,姚国营 ,倪前磊等。实现滚法中医推拿并串混联机器人的研究[J].机械设计与研究,2005(06):43-46.
[20] 余顺年,马履中等。基于并联机构中医推拿机器人机型研究[J].工程设计学报,2006(06):400-405.
[21] 杜光月,鲁守银等。中医按摩机器人人体穴位寻找功能设计[J].科技通报,27(5) ,2011:553-562.
[22] 刘玲云。中医按摩机器人专家系统的研究[D].山东建筑大学,2016.
[23] 高焕兵,鲁守银等。中医按摩机器人研制与开发[J].机器人,2011,33(5):553-562.
[24] 杜光月。仿人机械手中医按摩手法的建模与柔顺控[D].山东建筑大学,2012.
[25] 张玎飞,王田苗等。基于任务流的中医按摩机器人任务流程研究与设计[J].机器人技术与应用,2012(1):23-27.
[26] 张邦成,韩跃营,王占礼等。基于遗传算法的按摩机器人手臂控制系统[J].长春工业大学学报,2012,33(05):502-507.
[27] 李健。安全中医按摩机器人臂系统与控制策略研究[D].北京理工大学,2015.
[28] 胡云慧。中医经络穴位养生对老年病的护理作用[J].中外医学研究,2019,17(29):186-188.
[29] 沈雪勇,倪秀冬。背部腧穴的分布与脏腑关系探析[J].针灸临床杂志,1997(8):3-4.
[30] 罗才贵,姜青松,周志彬。推拿治疗腰椎间盘突出症的研究进展[J].四川中医,2005(7):31-34.
[31] 苑家敏,钟兰。背俞穴概述[J].实用中医药杂志,2012,28(03):236-237.
[32] 吴新贵,何源浩。背俞穴的主治作用及其机制[J].中国临床康复,2006(43):170+182.
[33] 严晓慧,严隽陶。推拿手法分类的规范化研究[J].中医学报,2017,32(5):875-878.
[34] 张成全。五种推拿手法的生物力学分析[D].中国中医科学院,2009.
[35] 庞军,王开龙等。论中医推拿按摩疗效的影响因素[J].辽宁中医杂志,2010,37(01):142-144.
[36] 鲁守银,李臣。中医按摩机器人关键技术研究进展[J].山东建筑大学,2017,32(01):60-68.
[37] 鲍官军。气动柔性驱动器 FPA 的特性及其在多指灵巧手设计中的应用研究[D].浙江工业大学,2006.
[38] 谢胜龙,梅江平,刘海涛。McKibben 型气动人工肌肉研究进展与趋势[J].计算机集成制造系统,2018,24(5):1065-1080.
[39] Suzumori K, Endo S, Kanda T, et al. A bending pneumatic rubber actuator realizing soft-bodied mantaswimming robot[C]//IEEE International Conference on Robotics and Automation. IEEE,2007:4975-4980.
[40] Marchese A D, Onal C D, Rus D. Autonomous soft robotic fish capable of escape maneuvers using fluidicelastomer actuators [J]. Soft Robotics, 2014, 1(1): 75-87.
[41] 李宝仁,刘军,杨钢。气动人工肌肉系统建模与仿真[J].机械工程学报,2003(7):23-28.
[42] 李雪,房善想,陈爽。软体机械手研究现状及其应用[J].制造业自动化,2019,41(5):85-92.
[43] Amend J R. A Positive Pressure Universal Gripper Based on the Jamming of Granular Material [J]. IEEETransactions on Robotics, 2012, 28(2): 341-350.
[44] 赵维超,刘庆运。人体颈肩按摩机械手设计研究[J].重庆理工大学学报,2017,31(11):102-108.
[45] Yahya E, Augusto V, Constantina L , et al. Finite element analysis and design optimization of apneumatically actuating silicone module for robotic surgery applications[J]. Soft Robotics,2014,1(4):255-262.
[46] Ganesha, U, Pramod, et al. Asymmetric bellow flexible pneumatic actuator for miniature robotic softgripper[J]. Journal of Robotics, 2014.
[47] Ogden, R.W. Large deformation isotropic elasticity on the correlation of theory and experiment forincompressible rubber like solids[J]. Rubber Chemistry and Technology, 1972, 46(1567): 565-584.
[48] 刘亭羽。仿生气动软体蠕动机器人的研究[D].哈尔滨工程大学,2018.
[49] 殷闻,靳晓雄 ,仝光。两种常用橡胶本构模型的有限元分析及其仿真[J].上海电机学院学报,2010,13(4):215-218.
[50] 钱胜 ,陆益民 ,杨咸启等 .橡胶材料超弹性本构模型选取及参数确定概述[J].橡胶科技,2018,16(5):5-10.
[51] 邵城。环纵肌复合的气动仿蠕虫软体机器人技术研究[D].南京理工大学,2018.
[52] 黄建龙,解广娟,刘正伟。基于 Mooney-Rivlin 模型和 Yeoh 模型的超弹性橡胶材料有限元分析[J].橡胶工业,2008(8):467-471.
[53] 燕山,王伟。橡胶类超弹性本构模型中材料参数的确定[J].橡胶工业,2014,61(8):453-457.
[54] 王华,康荣杰等。软体弯曲驱动器设计与建模[J].北京航空航天大学学报,2017,43(5):1053-1060.
[55] 樊继壮,于庆国等。软体仿蛙游动机器人关节式气动致动器研制[J].机器人,2018,40(5):578-586.
[56] 李四红,王玫瑰,吴德新等。硅胶工艺品的制作研究[J].山东化工,2013,42(2):26-28.
[57] 靳果,韩星等。机器人灵巧手的运动学分析及仿真[J].电子设计工程,2015,23(1):119-122.
[58] 孟欣,秦涛,涂福泉。2自由度手臂康复机器人运动学及动力学分析[J].机械传动,2019,43(8):59-63.
[59] 张政。下肢外骨骼机器人控制方法的研究[D].太原理工大学,2015.
[60] 张鹏程,张铁。基于矢量积法的六自由度工业机器人雅可比矩阵求解及奇异位形的分析[J].机械设计与制造,2011(8):152-154.
[61] 崔吉,张燕超。一种六自由度机械手的运动学分析[J].机械,2009,36(11):16-19.
[62] 张立超。仿人按摩机器人设计与研究[D].沈阳理工大学,2014.
[63] 李茜。基于2R伪刚体模型的柔顺机构动力学建模及特性分析[J].机械工程学报,2012,48(13):40-48.
[64] 孙佳。开关阀控气缸模型及 PWM 控制系统的研究[D].哈尔滨工业大学,2008.
[65] 冯搏,俞竹青。比例调压阀PWM控制气动力感的再现装置[J].机械设计与研究,2014,30(06):114-117.
[66] 石晓磊,岳龙旺。变刚度杆轴向压缩力的实验研究[J].科技创新与生产力,2017(8):91-93.
致谢
光阴荏苒,硕士研究生学习即将结束,三年的学习生活使我受益匪浅。经历三年的学习和实验,最终的成果都凝聚在硕士毕业论文中。回首三年来收集文献、整理、思索、改进直至实验和毕业论文全部完成的过程,我得到了许多的关怀和帮助,在这里我要向他们表达我最诚挚的谢意。
作为软体机器人课题研究成员之一,我要深深感谢我的两位导师,沈阳工业大学机械工程学院的张禹老师和李延斌老师。首先在课题研究方面,在张禹老师的指导和帮助下,让我顺利从接触软体机器人课题,到完成样机搭建,直到最后完成毕业论文,两位老师在学术研究上认真务实、严谨细致、精益求精的态度一直影响着我。其次在动手实践方面,张禹老师给了我很多实践动手的机会,参与了许多实际项目,从中积累了实践经验同时学到很多理论之外的知识,不仅积累了实践经验也拓展了学术眼界。
最后在课余生活方面,两位老师常常给我带来无微不至的关怀,在此我先向两位老师致以由衷的感谢和崇高的敬意。
我还要感谢我已经毕业的赵瑞颖学姐、陈严学长、李硕鑫学长以及在校攻读博士学位的赵文川学长对我课题和学习上的指导和帮助,同时感谢 17 级 213 实验室的王富民、李佳、李家铮、张博、孙正宇、白广东、张恒、姚广瑞、单涵琪等师兄妹们三年来的陪伴以及平时对我实验工作和学术研究的指点和帮助,特别是王宁师兄和赵东升学弟,在实验平台搭建和样机制作方面带来了许多帮助。同时也非常感谢我的室友在生活上的关心以及学习上创造的良好氛围。
最后衷心感谢我的家人和朋友在我求学路上的给我的关心和照顾,一如既往地支持我。也谢谢论文评阅老师们的辛苦工作,给了我审视几年来学习成果的机会。我将在以后的工作和学习中加倍努力,以期去的更多的成果回报他们、回报社会。再次感谢他们,祝你们身体安康、幸福长久!
(如您需要查看本篇毕业设计全文,请您联系客服索取)