24Сʱ���Ķ�������
24Сʱ���Ķ�������
����ժ Ҫ
�������,�������Ѿ��㷺��Ӧ�������ǵ�����������,�ӹ�����ˮ���Ϲ����Ĺ�ҵ������,���º�̽���ˮ�»�����,�ٵ��̳���������еķ��������,���Ƕ��ڸı������ǵ�����.����,�����������ӭ�����⡢�������еȷ���Ĺ㷺Ӧ��,���Ǽ���ط��������ǵ��ճ�����,���������������֮��ľ���.
�������ĵ���Ҫ�о�Ŀ�������Ƴ�һ��Ӧ���ڷ�������˵�ģ�黯���ͻ�е��,���Ի�е��ģ�������˶���ʵ�ַ��������о�,ʹ������������Ļ�е�ṹ�ͼ��ٵ��˶��滮����,��˱�����Ҫ��������:
��������,���ͻ�е�۽ṹ���.Ϊ��ʹ��е�۾������Ľṹ��ʽ,������ָ��ͻ�е�۵�Ӧ�ó����ƶ������,����������֫�ṹ�����˶����������ȫ����Կɲ�����ָ��ȷ����е�����Ź���,�������幤��ѧȷ����е�����˳ߴ缰���ؽ��˶���Χ;����ģ�黯�ؽڡ��ؽ����Ӽ�����ǵĽṹ���,Ϊʵ���������Ľṹ���,���ڽṹ�����Ż�����,ʹ�� ANSYS Workbench ��������Ҫ��������Ż���ƺͽṹУ��.
�������,��е���˶�ѧ�Ͷ���ѧ����.Ϊ��ʵ���˶����������,���øĽ��� D- H �������Ի�е�۽��������˶�ѧ���,���Ի�е�۵Ĺ����ռ���з���,���ü��η��ͽ������Ļ�Ϸ���������˶�ѧ,�� MATLAB �����н����˶�ѧ����;����ţ��-ŷ�������㷨������е�۶���ѧģ��,�� MATLAB �б�д������,���� ADAMS �����������л�е���˶�ѧ����.
�����ٴ�,��е�۷����˶������о�.�о���ͨ�� Kinect ���������˶����ݲ���ʵ�ַ���,�������˶�����ǰ�������������˷���,�о��˹ؼ�������ȡ���˻�ģ�ͼ���˶�ӳ��,�����һ�������˶������Ե�����ָ��.
�������,��е���˶�ʵ��.���� ADAMS �����������������˶����ֵķ���ʵ��;�Ի�е���˶�ѧ�������б궨,�о�ʵ�� D-H �����µĻ�е�����ģ�ͼ����˶�ѧ����������;��д�˻�е�ۿ��Ƴ���,��ʵ��������ʵ�ַ����˶�����ʵ��,���������о��ɹ�������֤������.
�����ؼ���:��е��;ģ�黯�ؽ�;������;�����˶�;���ƶ�
����Abstract
����Nowadays, robots have been widely used in people's production and life. Fromindustrial robots working on factory assembly lines to underwater robots exploring in thesea, to service robots in shopping malls and museums, they are changing our lives. Amongthem, service robots are widely used in welcoming guests, explaining, helping the elderlyand the disabled, which greatly facilitates our daily life and shortens the distance betweenpeople and robots.
����The main purpose of this paper is to develop a modular light manipulator for servicerobots, and to study the realization method of the manipulator imitating human motion,so that it has a light and flexible mechanical structure and a simple and fast motionplanning method. Therefore, the main contents of this paper are as follows:
����Firstly, the structure design of the light manipulator. In order to make themanipulator have flexible structure form, design criteria are formulated according todesign index and application occasion of the manipulator, the structure and motionmechanism of human upper limb are analyzed, and the optimal configuration of themanipulator is determined according to global relative maneuverability index. The sizeof the connecting rod and the range of motion of each joint are determined according toergonomics; modular joints, joint joints and outer shell are carried out. In order to achievelightweight structural design, based on the theory of structural topology optimization, themain parts are optimized and checked by ANSYS Workbench software.
����Secondly, kinematics and dynamics analysis of the manipulator. In order to achievemotion control and analysis, the forward kinematics of the manipulator is solved by theimproved D-H parameter method, and the workspace of the manipulator is analyzed. Theinverse kinematics is solved by the hybrid method of geometry and analytic method, andthe kinematics simulation is carried out in MATLAB software. The dynamic model ofthe manipulator is established based on Newton-Euler iteration algorithm, and the solvingprogram is written in MATLAB. The ADAMS virtual prototype is created to simulate thekinematics of the manipulator.
����Thirdly, the research on the humanoid motion method of the manipulator. Themethod of human motion data capturing by Kinect is studied. The pre-processing methodof human motion data is analyzed. The key posture extraction and motion mapping between human models are studied. An evaluation index of human motion similarity isproposed.
����Finally, the motion experiment of the manipulator is carried out. Based on ADAMSvirtual prototype, the simulation experiment of human motion reproduction is carried out;the kinematics parameters of the manipulator are calibrated, the error model of themanipulator under the actual D-H parameters and the correction method of the inversekinematics are studied; the control program of the manipulator is compiled, and thehuman motion reproduction experiment is realized on the real prototype, and the wholeresearch results are verified and evaluated.
����Key words: robot arm; modular joint; lightweight; human motion imitation; similarity
����Ŀ ¼
����ժ Ҫ..................................................................................................I
����Abstract...............................................................................................II
����Ŀ ¼.................................................................................................. IV
������ 1 �� ����............................................................................................ 1
����1.1 ������Դ............................................................................................. 1
����1.2 �����������....................................................................................... 1
����1.3 �������о���״...................................................................................... 2
����1.3.1 ���ͻ�е���о���״................................................................................ 2
����1.3.2 �����˶������о���״............................................................................... 8
����1.4 ��Ҫ�о�����.........................................................................................11
������ 2 �� ���ͻ�е�۽ṹ�����ṹ�Ż�...................................................................... 13
����2.1 ����................................................................................................ 13
����2.2 ���ָ���������.................................................................................... 13
����2.2.1 ���ָ��............................................................................................ 13
����2.2.2 �����........................................................................................... 14
����2.3 ����ѡ����ؼ�����ȷ��................................................................................. 15
����2.3.1 ��е�۹��ͷ������ۺ�............................................................................... 15
����2.3.2 ���˲��������ؽ��˶���Χȷ��......................................................................... 17
����2.4 ��е�ṹ���.......................................................................................... 18
����2.4.1 ������Ʒ���........................................................................................ 18
����2.4.2 ���ѡ��............................................................................................ 19
����2.4.3 ģ�黯�ؽڽṹ���................................................................................... 20
����2.4.4 �ؽ����Ӽ�����е��������.......................................................................... 22
����2.5 �ṹ�����Ż�........................................................................................... 23
����2.5.1 �ṹ�����Ż����ۼ��................................................................................. 23
����2.5.2 ANSYS Workbench �����Ż�ģ����..................................................................... 24
����2.5.3 ��Ҫ����ṹ�����Ż���У��............................................................................ 25
����2.6 ������.............................................................................................. 26
������ 3 �� ���ͻ�е�۵��˶�ѧ�붯��ѧ����...................................................................... 27
����3.1 ����................................................................................................. 27
����3.2 ���ͻ�е���˶�ѧ����.................................................................................. 27
����3.2.1 ���˶�ѧ����........................................................................................ 27
����3.2.2 ���˶�ѧ���........................................................................................ 30
����3.2.3 �˶�ѧ����.......................................................................................... 32
����3.3 ���ͻ�е�۶���ѧ����.................................................................................. 33
����3.3.1 �ؽ��ٶ����........................................................................................ 34
����3.3.2 ţ��-ŷ������ѧ����.................................................................................. 35
����3.4 ���� ADAMS �������ɶȻ�е�۶���ѧ����................................................................... 36
����3.4.1 ADAMS �������....................................................................................... 36
����3.4.2 ��е�۷���ģ�ͽ���................................................................................... 37
����3.4.3 ��е�۶���ѧ����...................................................................................... 38
����3.5 ������................................................................................................ 40
������ 4 �� ���ͻ�е�۷����˶������о�........................................................................... 41
����4.1 ����.................................................................................................... 41
����4.2 ���� Kinect �������˶����ݲ���ϵͳ ...................................................................... 41
����4.2.1 �˶����ݲ����豸���................................................................................... 41
����4.2.2 ���� Kinect �������˶����ݲ���ϵͳ .................................................................... 42
����4.3 �����˶�ģ��............................................................................................ 44
����4.3.1 �����˶����ݲɼ�....................................................................................... 44
����4.3.2 ���������˶�����ǰ����................................................................................. 46
����4.3.3 �ؼ�������ȡ.......................................................................................... 49
����4.3.4 �˶�����ӳ��.......................................................................................... 50
����4.4 �����˶�����������...................................................................................... 50
����4.5 ������................................................................................................ 53
������ 5 �� ���ͻ�е���˶�ʵ��................................................................................... 54
����5.1 ����.................................................................................................... 54
����5.2 ��е�����������˶�ʵ��................................................................................... 54
����5.2.1 �����������........................................................................................... 54
����5.2.2 ����ʵ��.............................................................................................. 55
����5.3 ��е���˶�ѧ�����궨...................................................................................... 56
����5.3.1 ��е���˶�ѧ�����궨ԭ�������ݲ���....................................................................... 56
����5.3.2 ��е�ۼ������ģ��...................................................................................... 59
����5.3.3 ��е�����˶�ѧ����...................................................................................... 60
����5.3.4 �궨�������........................................................................................... 61
����5.4 ��е��ʵ�������˶�ʵ��.................................................................................... 62
����5.4.1 ��е�ۿ��Ʒ������..................................................................................... 62
����5.4.2 ʵ�����������˶�ʵ��................................................................................... 64
����5.5 ������................................................................................................. 66
������ ��....................................................................................................... 67
���������...................................................................................................... 68
������������ҵ��ѧѧλ����ԭ����������ʹ��Ȩ��...................................................................... 72
������ л......................................................................................................... 73
������1�� ����
����1.1 ������Դ
������������Դ�ڻ����˹�˾���������Ŀ--WS702 ������.
����1.2 �����������
���������˼�����������������Ĺ㷺��ע,ͬʱҲ��Ϊ�˸����Ƽ������Ĺؼ�����,�ڲ�Զ��δ�����ǽ��Ჽ�������ʱ��.���,��ʽ�����ķ���������Ѿ�Ƶ���س��������ǵ��ճ�������,����������˵Ĺ�ϵҲ���ڱ����������.
�����ҹ��Է�������˵��о���ʼ�������� 90 ���,�����ڶԹ�ҵ�����˵��о�,�����о���Ҳ�����ձ���ŷ���ȹ�[1].������ 30 ��������о�,��ʽ�����ķ���������Ѿ����뵽���ǵ�Ѱ��������,�����ͥ�е�ɨ�ػ����ˡ�¥��Ļǽ��ϴ�IJ��������ˡ������е��Ͳͻ����ˡ����к�ҽԺ��������ҵ������������˵ȵ�,��Щֻ�Ƿ�������˾���Ӧ�õ�һ����Ӱ.���������ͨ�����������֡���Ƶ�ȶ� �ֱ�����ʽ�����ܻ��Ŀ��Ʋ��Կ��Ը�Ч������������,����ط���ͷḻ�����ǵ��ճ�����.
�������ڷ��������,���ʻ��������ϻ����������һ����������:��Ҫ�����ϴ���ͻ��������������ȶ���������ķ�����,����ִ�й�ҵ��������IJ�����������ȫ�����Ļ�����[2].�ҹ��ڡ������г��ڿ�ѧ�ͼ�����չ�滮��Ҫ(2006~2020 ��)�� �ж����ܷ��������Ҳ��������ȷ����:���ܷ�����������ڷǽṹ������Ϊ�����ṩ��Ҫ����Ķ��ָ������ɵ����ܻ�װ��[3].
�������ڹ�����˵,�Ƚ��Ļ����˼����������ǿ�˾���ʵ�����ٽ��˾��÷�չ���������������ˮƽ,������Ҷ����Ƚ������˼������о����ڿƼ���չ����Ҫս�Ե�λ,ͬʱҲ�ƶ�����Ӧ�Ļ����˷�չ�ƻ�[4].������ 2010 �귢���ˡ�������ս��Ƥ�顷[5],�ڶ�������ʽ����"���һ����˷�չ�ƻ�",ּ���о�������һ�������˺��Ĺؼ�����[6].Ϊ�˴������÷�չ���ƶ������˼����ڸ�������Ĺ㷺ʹ��,2014 �� 6 ��ŷ��������"SPARC"�������о��ƻ�[7],2017 �� 12 �·�����"SPARC"�ƻ������һ����Ŀ�滮--"��ƽ�� 2020 �ƻ�",�¼ƻ���һ���ؿ��������˻����˼�����Ӧ������,�ص��о������˵��˹����ܡ���֪�������罻���˻������ȼ���[8].�ձ��Ļ����˼��������Ź����Ƚ�ˮƽ,�� 2014 �귢���ˡ���ҵ����ҵ�������Զ�������Ƥ�顷[9],2015 ����ʵʩ��"��������ս��",Ͷ��ǧ����Ԫ,�����ƶ������˼��������ܻ���Эͬ�������ݻ���չ,Ӫ��������ڸ�������㷺Ӧ�õ��»���[10].���������˷�չǿ�����ܻ��������ִ�������,�ƶ���"839"ս�Թ滮,����������˼���ȷ��Ϊ�Ŵ����Ҫ��֮һ[11].���ͬʱ,�ҹ�Ҳǿ�����ȷ�չ�����������ؼ���,�ڡ��й����� 2025���滮��Ҫ�и��ǽ���������������ص㷢չ����֮��,���ͻ�ƻ����˱��塢���������ŷ�����������������������������ȹؼ��㲿����ϵͳ�����������ȼ���ƿ��[12].ͨ����Щ�����������ߵķ����Լ������У���о����������о�,�ҹ������ܷ��������������ȡ���˾�Ľ���[13].
�����ڸ�ʽ�����ķ����������,����˫�۵ķ���������ܹ����õ�������Эͬ������������ָ������,�����ڴ������������л�е��ռ������Ҫ��λ.��������˵�Ӧ�ó��Ϻ;��幦��Ҫ�����Ļ�е��Ӧ���нṹ�������˶���������ȫ�ɿ����ص�,�������е������Ʒ�������Ĺ�ҵ��е���ڽṹ�����ϴ�����һ���IJ���,ֱ�����ù�ҵ��е�۵���Ʒ���һ���������������˵�ʹ��Ҫ��.�����г���Ӧ���ڷ�������˵Ļ�е�۶���ø��ؽڶ�����ƵĽṹ��ʽ,������������ڽϳ����۸�װά���㡢���Ϲ���ʱ��̵���������,�����谭�˾��л�е�۵ķ�������˵��ƹ�ʹ��.
����ӵ��ӭ�����������ܵķ����������Ҫ�������ַ��˵��ճ��������ӵ��赸����.��Щ�����Ƕ��ֶ�����,�����ڶ������֮���ֺ��������ݶ������ֱ������;��ʹ��������,�÷�����ʵ�ֲ���Ҳ���ڸ��Ӻͷ���,����û��רҵ֪ʶ�����Ŀ�����ʹ������˵�����������.��һ��,Ϊ������û�����,Ӧ���ؿ��ǻ�е�۶��������˻��̶�,�����䶯�����������ද��һ����Ȼ������������.
�������������о�������ʵ���д��ڵ�����,�����⽫�����͡����˻���е�۵Ľṹ��ƺͻ�е��ģ�������˶���ʵ�ַ����о���Ϊ���ĵ���Ҫ�о�����,��һ���̶���,��������˴��ڵ�ʵ������,����Ӧ�˹��ҷ�չս��,�������õ������������ʵ����.
����1.3 �������о���״
����1.3.1 ���ͻ�е���о���״
������е�۵�ģ�黯���˼���ɹ���ѧ�������,Wurst ��ʿ���罫��˼��Ӧ�õ���е�۵Ľṹ��Ƶ���[14][15].Wurst ��ʿ��Ƶ� Oshiba ģ�黯��е��ϵͳ�ɹؽ�ģ�顢����ģ��ʹ����ݸ˵Ŀ��Ƶ�Ԫ���,ͬʱ���ж���������ʽ.
����RMMS(Reconfigurable Modular Manipulator System)������ѧ���з��ĵ�һ����ع�ģ�黯��е��[16],��ͼ 1-1 ��ʾ.RMMS ������ 6 ��ģ�黯�ؽ�,����4 �����ɶ�,���ؽ���ֱ���ŷ������Ϊ������,ͨ��г�����������м���,��Щģ���ж����������,���һ��� RMMS �Ŀ���ϵͳ������Ӧ��ͬ��ģ��������ʽ.

����YuMi ����ʿ ABB ��˾������ʵ���˻�Э����˫�ۻ�����,���һ��������������ʵ����(Underwriters Laboratories)�İ�ȫ��֤[17].��ͼ 1-2 ��ʾ,YuMi����������Ϊ 38Kg,ÿ�����ͻ�е�۾��� 7 �����ɶ�,�����ֱ������Ϊ 0.5Kg,�ظ�����Ϊ 0.2mm[18].YuMi ��Э���������ж�̬����Ӧ��,�����������ԱЭ����ɸ�������,���м��ߵ�Э����ȫ�ԺͼIJ���ϵͳ,��ʹ��û��רҵ֪ʶ��ʹ����Ҳ���Ա�дһЩ�˶�����.

�����¹� KUKA �����˹�˾������ 1995 ��,ӵ���Ź������ȵĻ����˼���,LBRiiwa �Ǹù�˾�Ƴ���һ�������ɶ����ͻ�����.��ͼ 1-3 ��ʾ,LBR iiwa ���ͻ�е�������������ֱ�Ϊ 22Kg �� 30Kg �����ֹ��,���������ֱ�Ϊ 7Kg �� 14Kg,���нϸߵĸ������ر�;���������(��ȫ��������)�������˱�������,������ʵ�������˶�,ͬʱ�������ܺ�[19];LBR iiwa �����������ɶ�,����ͬһĿ����ж��ֵ���·��,����ʵ��������;ӵ�� 3 �ֹ���ģʽ���Ӽ��Ϳ��ŵı�̻���.LBR iiwa ������������ɵ��ơ���ƿ�ǵ��ճ�����.

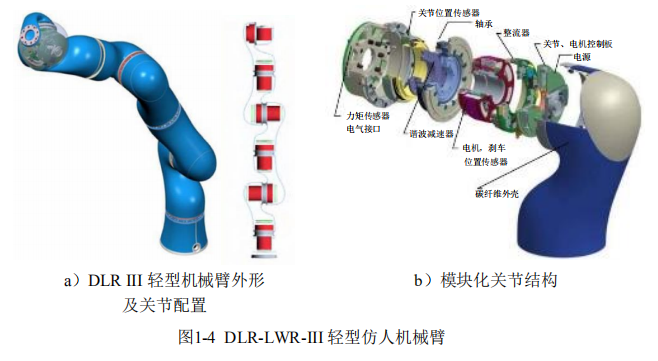
�����¹������(DLR)Ϊ������̫���й�����������Ҫ,�������ȫģ�黯�ĵ��������ͷ��˻�е�� DLR-LWR-III[20],����ṹ���ؽ�������ģ��ؽڽṹ��ͼ 1-5 ��ʾ.DLR-LWR-III ���� 7 �����ɶ�,�� 14Kg,����� 14Kg,���кܴ�ĸ������ر�,�ϵڶ������,�ؽ��ٶ������� 120°/s[21].DLR-LWR-III ͨ������ SERCOS ����ϵͳ����ͨ��,ģ�黯�ؽڽṹ���ռ��ɶȸ�,����ģ��ͨ��̼��ά�ṹ���л�е����,�����˵ڶ����Ĵ����ʹ��м����о��ɹ�,������RoboDrive ILM �����ص��,�������ܺ�ֻ����ͨ�����һ��,����Ľ����˹ؽ�����,�������������[22].
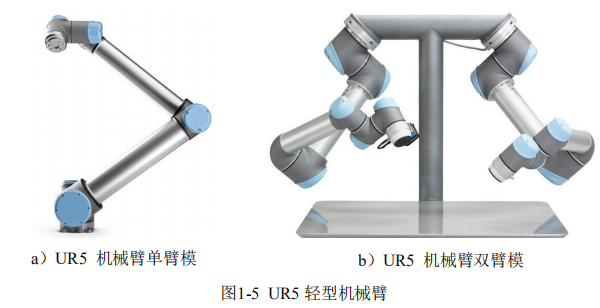
������������˹�˾ Universal Robots �������ڰ�װ��ʹ�õ�ԭ������� UR ��е��,UR5 ���ͻ�е����ͼ 1-5 ��ʾ,���� 18.4Kg,ĩ������� 5Kg,�ɴﷶΧ850mm.UR ��е�۵��˻�Э������ʹ�ò�����Ա�ܹ��������������Эͬ����,һ��������������ײ,�����е������������ĽӴ����ﵽ���õ�����ʱ,UR ��е�۽����Զ�ֹͣ����.����,UR ��е�ۿ���ͨ���ٿؽ��������ϵļ�ͷ��ʵ�ֻ����˵��ƶ�����,����רҵ��������ʵ�ֻ�е�۵ļ��˶�����[23].
����Pepper ��һ����˳̶Ⱥܸߵķ��������,���ձ��������źͷ��������幫˾�����з�,��ͼ 1-6 ��ʾ.�û����˵ĵ��۾��� 5 �����ɶ�,��צ���� 1 �����ɶ�,�����������,���к�������ȶ���,���ѹ㷺Ӧ�����̳���չ�ᡢ���С�ѧУ�ȳ���,���е�۽ṹ�����÷����������ʮ�־��д�����[24].Pepper �Ļ�е�������������ץȡ�ȹ���,����������������,�˶�ʮ�����.

������Ȼ�ҹ��Է�������˵��о�����,��������Щ�����Ĵ�����չ,�����ڶ��У������Ժ����˾�Ѿ�ȡ���˷�˶���о��ɹ�.
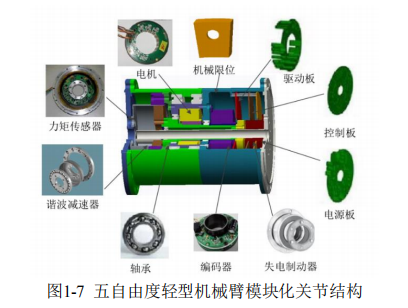
������������ҵ��ѧ�����������ͻ�е�۵Ĺؼ����������������о�.��ͼ 1-7 ��ʾΪ��������ҵ��ѧ���Ƶ�һ�����ͻ�е��ģ�黯��˳�ؽ�,��ģ�黯�ؽ��м��������������г����������ʧ���ƶ��������������������ȶ��ֲ���,���Ҿ��б��Ļ�е�ӿں͵����ӿ�[25].
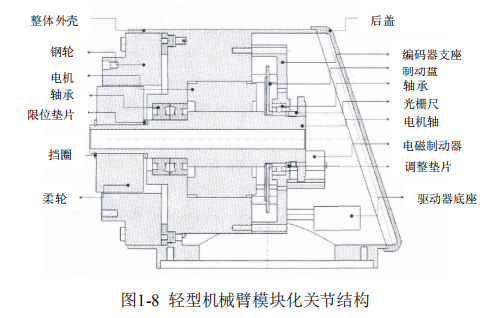
�����й���ѧ������ѧ������һ�������ɶ�ģ�黯���ͻ�е��,���ǵ���ͬ�ؽ�������ͬ,Ϊ����߹ؽڵ���Ч����,�ڽṹ����зֱ�Ϊǰ�����ؽںͺ������ؽ���������ֲ�ͬ�Ĺؽ�ģ��,ǰ�����ؽڵ��ڲ��ṹ��ͼ 1-8 ��ʾ.��ģ�黯�ؽڽṹ����,�ؽ��ڼ��������������������������������������Ȳ���,���жϵ��ƶ���������.���ùؽڿ��������������������ķֲ�ʽ�ṹ�Ŀ��Ʒ���,����˹ؽ�ģ���ڵ���ϵͳ�ϵ�ģ�黯ˮƽ[26].
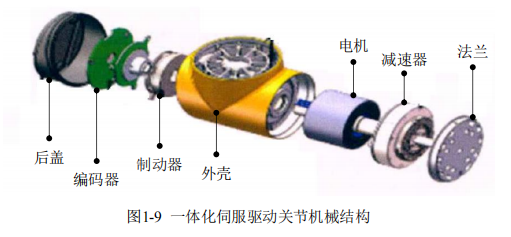
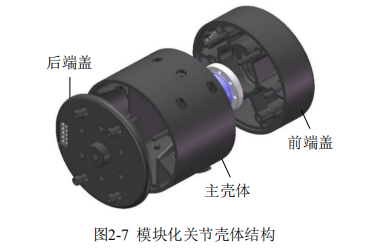
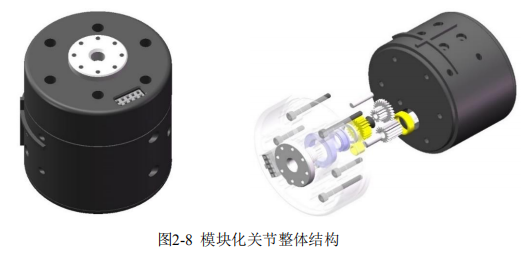
����������ͨ��ѧ������һ�������ɶ����ͻ�е��,��ģ�黯�ؽڽṹ��ͼ 1-9 ��ʾ,�����ؽ�ģ�齫������������������������Ȳ�������һ��.ÿ��ģ�黯�ؽڶ����������Ļ�е�ṹ�Ϳ��Ƶ�·,ͬʱ�ֱ�Ϊ��е���Ӻ͵������������ͨ�õĿ��ٽӿ�,ģ���ڲ��洢�����Ա����˶���Ϣ,��֤ÿ���ؽڿɲ�κͿ����滻[27].Ϊ��ʵ��ģ�黯�ؽڵ����������,���ݽṹ�����Ż����۶���ǽ����˽ṹ�Ż�.
�������ɻ������Զ����ɷ�����˾�������й���ѧԺ,���й������˲�ҵ����ǣͷ��ҵ֮һ,�����Ƶ� SCR5 �����ɶ����ͻ�������ͼ 1-10 ��ʾ.�����ͻ�е������ 33.8Kg,���شﵽ 5Kg,���нϸߵĸ������ر�,ͬʱ�߱���ײ��⡢�Ӿ�������ǣ��ʾ�̵ȹ���.������������ƵĻ�е�۽��ܻ���,�������ɶȵĴ���ʹ�ñ��ϸ�Ϊ���,���尲ȫ�Ը�,�˻�Э������ͻ��[28].

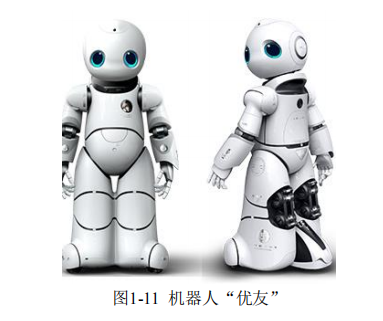
�������������ǹ���һ�������Ļ�������ҵ,�ù�˾������������÷��������"����"��ͼ 1-11 ��ʾ."����"�Ļ�е���ڹ����г��зdz����д�����,��ӵ��5�����ɶ�,����ߴ�ӽ���ͯ�ֱ�,���п��ٲ�ж�밲װ�Ĺ���,���㰲װ��ά��,�Ѿ��ڹ����ڶ�չ��õ��㷺ʹ��[29].
��������������ͻ�е�۵��о���Ϊע�����۲���,�书��ƫ����װ�䡢���˵���ҵҵ��,����ṹ����,����������Ƚϸߵ��۸�,����������Ҫִ�б��ݡ�ָʾ������ķ��������.���,��Ҫ�ҵ����ܺ���֮���ƽ���,��Ӧ���ڷ�������˵����ͻ�е�۽ṹ���չ�������о�.

����…………���ڱ���ƪ���ϳ�,��������ʡ��,��ϸȫ�ļ���ĩ����
������ ��
������������ڷ�������˵�Ӧ�ó��Ϻ�ģ�黯�����˼����������ͻ�е�۵Ľṹ���,���о���һ�ֻ��������˶����ݵĻ�е�۹켣�滮����,��Ҫ���о��ɹ�����:
����(1)�����Ӧ���ڷ�������˵�ģ�黯�ؽ�,ͨ���ı���ٱȵõ�������ز�ͬ������ģ�黯�ؽ�,���нṹ����,����������ص�;����ȫ����Կɲ�����ָ��ѡȡ�˻�е�۵����Ź���,��˻�е������ͬ���ɶ���ӵ����ߵ�����;���ڽṹ�����Ż�����,����Ҫ��������˽ṹ�Ż�,��һ��ʵ�����������.
����(2)�����˻�е�۵��˶�ѧģ��,������˶�ѧ�����,ͨ�� MATLAB �������˶�ѧ�������������֤;�Ի�е�۽����˶���ѧ����,����ţ��-ŷ���������̽����˻�е�۵Ķ���ѧģ��,Ȼ���� ADAMS �н�������������,����˶���ѧ����.
����(3)�о���һ�ֻ��������˶����ݵĻ�е�۹켣�滮����,��д�˻��� Kinect�������˶�������,�õ��������˶����ݵ�ǰ��������,�����˹ؼ�������ȡ���˶�����ӳ��,��������һ�����˶��������Գ̶ȵ�����ָ��.
����(4)��ʵ�������������˶�ѧ�궨,�ڴ˻������о��˻�е�����ģ�ͺ����˶�ѧ����������,����˻�е�۵�ʵ�ʶ�λ����;��д�˻�е���˶����Ƴ���,����ʵ����������ʵ��,��е�۽ṹ�ȶ�,����ʵ������˶�,ͬʱ,�����˶�ʵ�ַ����ܹ��Ϻõĸ��������˶�,�����ʵ����Ƚ�,������ָ����ԶԷ����˶��������Խ�����������.
������Ȼ��������ͻ�е�۵Ľṹ��Ʋ�̽����һ�ַ����˶�ʵ�ַ���,ʹ�û�е���ܹ�������ƺ�ʹ��Ҫ��.����,���ڶ������ص�Ӱ��,�ṹ��ƺͷ����˶������Բ�������,������Ҫ��һ���Ľ�֮��,���������:
����(1)�ӹ����ȵIJ�������˽ṹ�����һ�����������ļ�϶,�Ի�е���˶������һ����Ӱ��.
����(2)�˶�ӳ�䷽���о���Ȳ���,δ���ǻ�е�۶���ѧ���˶�ӳ���Ӱ��.
����(3)����ʱ�������,�����һ���о����ģ�����˶�ģ�����ݼ��ķ�����������ȡ,ʵ���˶����ε����ƴ���㷨.
������ л
����ת�ۼ������˶ʿ���������,���ȸ�л�ҵĵ�ʦ���������ڶ��ҵ�Ϥ��ָ��,�ڿ����о��ڼ�,����ʦ�����ܴӰ�æ֮�г��ʱ�䶽���ҵ��о�����,��Ϊ��ָ���о�����,��������������ʱΪ�ҿ������.���㷺Ԩ����ѧʶ,�Ͻ��� ʵ�Ŀ�ѧ̬��,���渺��ľ�ҵ��������������Ӧ������ߺÿ�������·,Ϊ�������������İ���,�����ܳ�Ϊ����ʦ��ѧ��,������������.�ڴ�,������ʦ��ʾ����ľ���!
�������ĸ�л���������˾��ѩ���³�������ܼ�Կ�����Ŀ�Ĵ���֧�ֺͶ��ҳ����ڼ�Ķ���չ�,��л��˾ͬ��ë�������º��ϡ������㡢�ų��桢�������˶���Ŀ�����Ĺ���,��Ϊ���ǵĸ�����ʹ���ҵĿ����ܹ�˳���ƽ�,ͬʱ��˾Ũ����о������̤ʵ�Ĺ�������ʹ����������.
������л�������Ÿ�����ʦ�����־ʦ�֡�����ͬѧ���ҿ�����������ʱ���ҵ���˽����,���ǵİ���ʹ���ؿ����о�˼·,�������о�����,��ʹ�ú���ʵ���ܹ�˳������.��л���л���ա���һ����֧���Ҷ��е�������,���ǵĹ��������ʹ���������Ͽ��еĵ�·.
������л���Ѷ������ű�������Ϊ�Ҵ��������õ����ỷ��,����������ʱ���ҵĹ�����Ȱο,�����о�֮��������÷ḻ��ʸ�����Ȥ.
�����ڴ�,��Ҫ��л�ҵļ���,�����ǵ���˽֧�ֺ�ĬĬ������ʹ�Ҳ�η����,����ǰ��,�л���ȥʵ���Լ�����������.
���������
����[1]�췽, ��ϣΰ, �����. �ҹ���ͥ��������˲�ҵ��չ��״���б���[J]. �����˼�����Ӧ��, 2009(2):14-19.
����[2]International Federation of Robotics. Service Robots - Definition and ClassificationWR 2016[OL],[2019-06-15].https://www.ifr.org/img/office/Service_Robots_2016_Chapter_1_2.pdf
����[3]�л�������ѧ������. �����г��ڿ�ѧ�ͼ�����չ�滮��Ҫ(2006-2020).
����[4] Chen Q. The focus of the US National Robot Program funding[J]. ShanghaiInformatization, 2016(2):78-80.
����[5] Defense Technical Information Center. Robotics strategy white paper[DB/OL].(2009-03-19) [2016-11-21].
����[6] NASA. National robotics initiative(NRI) [EB/OL]. (2011-07-25) [2016-11-21].https://www.nasa.gov/robotics/index.html.
����[7] Uwe H. € 2.8 billion to strengthen EU lead in robotics [OL],[2014-05-28].http://www.eu-robotics.net/cms/upload/PPP/28_05_2014_SPARC_Press_Release_English.pdf.
����[8] Rezia Molfino.���ŷ��"��ƽ�� 2020 �ƻ�"�Ի����˲�ҵ��չ��Ӱ��[J].�����˲�ҵ,2018(05):40-44.
����[9] New Energy and Industrial Technology Development Organization. 2014 whitepaper on robotization of industry, business and our life[DB/OL]. (2014-06-05)[2016-11-21].
����[10] ���ӽ�, ������. �ձ����»������з��ƻ����䷢չս��[J]. �����˼�����Ӧ��, 2016(5).
����[11] Korea IT Times. MIC policy - Robots as perfect companions[EB/OL]. (2009-04-17) [2016-11-21].
����[12] ���ƻ�, �쾸, ½־����. ���˷�������˷�չ���о���״[J]. ������,2017(4).
����[13] �췽,��ɽ. �����й���������˲�ҵ���[J]. �����˲�ҵ,2015(02):40-45.
����[14] Matsumaru T. Design and control of the modular robot system: TOMMS[C].Robotics and Automation, 1995. Proceedings. 1995 IEEE International Conferenceon. IEEE, 1995.
����[15] Wurst K H. The conception and construction of a modular robot system[C]. 1986.
����[16] Paredis C J J , Brown H B , Khosla P K . A rapidly deployable manipulator system[J].Robotics and Autonomous Systems, 1997, 21(3):289-304.
����[17] ABB ȫ��������ʵ���˻�Э����˫�ۻ����� YuMi ��ʽ�����г�[J]. ��������, 2015(5).
����[18] New safety standards for collaborative robots, ABB YuMi? dual-arm robot[C].IROS 2015, Workshop "Robotic co-workers- methods, challenges and industrial testcases". 2015.
����[19] ����. ��Ƴ��������˻�Э�������� LBR iiwa[J]. ���������,2014(45):67-67.
����[20] Ott C , Eiberger O , Friedl W , et al. A Humanoid Two-Arm System for DexterousManipulation[C] IEEE-RAS International Conference on Humanoid Robots. IEEE,2006.
����[21] Christoph Borst,Christian Ott. A Humanoid Upper Body System for Two-handedManipulation. IEEE International Conference on Robotics and Automation. 2007:2766~2766.
����[22] Hirzinger G , Sporer N , Schedl M , et al. Torque-controlled light weight arms andarticulated hands - do we reach technological limits now?[M] ExperimentalRobotics VIII. Springer Berlin Heidelberg, 2003.
����[23] Vaular T. Software for Robot Assisted Physical Therapy: Establishing Viability andPrototyping Using Universal Robots UR5[D]. 2016.
����[24] SoftBank. Pepper �ȤΥ��ߥ�˥��`�������ä�[EB/OL]. (2019-04-08)[2019-05-31].
[25] �����. ���ͻ�е��ģ�黯��˳�ؽ��о�[D].��������ҵ��ѧ,2015.
����[26] ���Ӻ�. ���ͻ�е�۽ṹ������ϵͳ������о�[D].�й���ѧ������ѧ,2017.
����[27] ����. ���ͻ�е�۵Ľṹ�������Ż����[D]. 2017.
����[28] �� �� �� һ �� �� �� �� ʢ װ �� �� �� �� �� �� �� �� �� �� �� �� �� [J]. ���ܻ�����,2018(05):27.
����[29] ����,�Ϸ�.Hello! ��������������[J].�廪��������,2016(05):80-88.
����[30] Vadakkepat P. Humanoid Robotics: A Reference[J]. 2017.
����[31] Gams A , Jesse V D K , Dzeladini F , et al. Real-time full body motion imitation onthe COMAN humanoid robot[J]. Robotica, 2015, 33(05):1049-1061.
����[32] Vuga R , Ogrinc M , Gams A , et al. Motion capture and reinforcement learning ofdynamically stable humanoid movement primitives[C] IEEE InternationalConference on Robotics & Automation. IEEE, 2013.
����[33] Kim J Y, Kim Y S. Whole-body motion generation of android robot using motioncapure and nonlinear constrained optimization[J]. International Journal ofHumanoid Robotics, 2013, 10(02):1350003.
����[34] �Ų���,���ʷ�,������.���� Kinect �������ɶȿռ��е����п��Ʒ���[J].���˺���,2019,25(01):85-91.
����[35] Nakaoka S, Nakazawa A, Yokoi K, et al. Generating whole body motions for a bipedhumanoid robot from captured human dances[C]. IEEE International Conference onRobotics & Automation. 2003.
����[36] Nakazawa A, Nakaoka S, Shiratori T, et al. Analysis and synthesis of human dancemotions[C]. IEEE International Conference on Multisensor Fusion & Integration forIntelligent Systems. IEEE, 2003.
����[37] Okamoto T, Shiratori T, Kudoh S, et al. Toward a Dancing Robot With ListeningCapability: Keypose-Based Integration of Lower-, Middle-, and Upper-BodyMotions for Varying Music Tempos[J]. IEEE Transactions on Robotics, 2014,30(3):771-778.
����[38] Inamura T, Toshima I, Tanie H, et al. Embodied Symbol Emergence Based onMimesis Theory[J]. The International Journal of Robotics Research, 2004,23(4):363-377.
����[39] ������,��ǿ,����.���˻����˸��Ӷ�̬������Ƽ��������о�[J].�Զ���ѧ��,2007(05):522-528.
����[40] Kaneko K, Kanehiro F, Kajita S, et al. Design of Prototype Humanoid RoboticsPlatform for HRP[C]. IEEE/RSJ International Conference on Intelligent Robots &Systems. IEEE, 2002.
����[41] Morecki A. Biomechanics of Engineering: Modelling, Simulation, Control[J]. 1987.
����[42] л����,�Ծ�.����������Լ���ķ���ɲ�����[J].��е����ѧ��,2010,46(23):8-15.
����[43] YOSHIKAWA T. Manipulability of robotics mechanisms[J]. International Journalof Robotics Research, 1985,4(2):3-9.
����[44] �Ծ�,�δ���,�ű�.�������幤��ѧ�ķ��˻�е�۹���[J].��е����ѧ��,2013,49(11):16-21.
����[45] ������.�˻�����ѧ[M].����:����������ѧ������,2011.
����[46] Bendsoe M P, Sigmund O. Topology Optimization: Theory, Methods, andApplications[M]. Berlin, Heidelberg, New York: Springer, 2003.
����[47] ������,Ҧ����.������ṹ�����Ż���������[J].���չ��̽�չ,2011,2(01):1-11.
����[48] Mlejnek H P, Schirrmacher R. An engineer' s approach to optimal materialdistribution and shape finding computer method in applied mechanic andengineering [ J] .Computer Methods in Applied Mechanics and Engineering , 1993 ,106(1-2):1-26 .
����[49] Denavit J and Hartenberg R S, A Kinematic Notation for Lower-PairMechanismsBased on Matrices. Journal of Applied Mechanics, pp. 215-221, June1955.
����[50] Craig J J. Introduction to Robotics Mechanics and Control[M].����:��е���̳�����,2006.
����[51] Brisan C, Csiszar A. Computation and analysis of the workspace of a reconfigurableparallel robotic system[J]. IEEE Mechanism and Machine Theory, 2011, 46(11):1647-1668.
����[52] Yang H, Lee D. Dynamics and control of quadrotor with robotic manipulator[C].International Conference on Robotics & Automation. IEEE, 2014.
����[53] Luh J Y S, Walker M W, Paul R P C. On-Line Computation Scheme for MechanicalManipulators[J]. Journal of Dynamic Systems Measurement and Control, 1980,102(2):69-76.
����[54] ������,������,�߽���.���˻����˸��Ӷ�������������˶�������ȡ����������[J].�Զ���ѧ��,2010,36(01):107-112.
����[55] Aggarwal J K , Ryoo M S . Human Activity Analysis: A Review[J]. ACMComputing Surveys, 2011, 43(3):16.
����[56] Wu X, Xu D, Duan L, et al. Action recognition using context and appearancedistribution features[C]. IEEE Conference on Computer Vision & PatternRecognition. Washington D.C.:IEEE, 2011:489-496.
����[57] Fenglin Liu, Wei Zeng, Chengzhi Yuan, et al. Kinect-based hand gesturerecognition using trajectory information, hand motion dynamics and neuralnetworks[J]. Artificial Intelligence Review, 2019, Vol.52 (1), pp.563-583.
����[58] Real-time human pose recognition in parts from single depth images[J].Communications of the ACM, 2013, 56(1):116.
����[59] ��Խ. OpenNI ���Ӧ�ÿ���ʵս[M].����:��е��ҵ������,2014[60] Webb J, Ashky J. Beginning Kinect Programming with the Microsoft KinectSDK[M].Apress, 2012.
����[61] Boor C D . On calculating with B-splines[J]. Journal of Approximation Theory,1972, 6(1):50-62.
����[62] ���ĵ�,��־ƽ,������,����.���˻������������˶��о���չ[J].�����Ӧ���о�,2013,30(09):2570-2575.
����[63] ���ĵ�. ���������˶������Եķ��˻������˶��滮�ؼ������о�[D].��������ҵ��ѧ,2013.
����[64] �ű���. ����������ӳ�䷽��������ʵ���о�[D].���������̴�ѧ,2015.
����[65] ������,��ǿ,������,������,��ƽ�.���������˶��ķ����ͻ����˶������˶�ѧƥ��[J].������,2005(04):358-361+379.
����[66] ������. ��Լ���������Ƚ�����ϵͳ��������������о�[D]. ����:�й���ѧԺ�о���Ժ. 2002.
����[67] Peiper D L. The kinematics of manipulators under computer control[J]. Ph.D ThesisStanford University, 1968.
����[68] Hayati S, Tso K, Roston G. Robot geometry calibration[C]. IEEE InternationalConference on Robotics & Automation. IEEE, 1988.