24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժҪ
�����۱���ڲ���������ǿ���䡣����Ⱦ���߶��ԡ���Ҫ�����Ʋ����������������ά��������ң����ϵͳ�Ѿ���չ��Ϊδ���۱��-һ���ز����ٵ���ϵͳ�� ���δ���й��۱乤�������װ�ã������ά��������������ά����ƣ���Ҫ�ϲ��ĵ�װ�������²��Ķ���D��ƽ̨Эͬ��ɰ����ת�ˡ���ת��֮ǰ������ײ��������֧����ͨ����������������-�� �����Ҫ����һ������ ����ײ�����������װ�Ķ�ܾS����е��ϵͳ��
��������й�δ���۱�Ѱ���ײ����������IJ�װ���⣬�ڳ�ֵ��й������п�����װ�ð���ģ��ά�����������״�Ļ����ϡ���Ƴ����ܹ���װ���������Ķ�ܻ�е�۵ľ���ṹ����������������ԣ������������ơ���С�˶��ռ������¾۱�Ѱ���ײ�ά����е�۽ṹ��ơ��˶�ѧ������ѧ�������������֤���⡣���幤���������¡�
����1.ͨ�����й�����۱�ѵ�ǰ����ά������Ʒ���������δ���й��۱乤������Ѱ���ײ�����Ŀռ�ߴ磬�Ƚ϶��ֽṹ��ʽ�Ļ�е�ۣ���Ƴ������ֲ�ͬ�ṹ�Ļ�е�ۣ��Ա����ֽṹ����ȱ�㣬����ѡ������ʵĹؽ�������ṹ��
������ϰ����ά��ʵ�ʹ������Ի�е�۵ײ������ƶ����ɶ���ƣ��ڴ˻������ϡ�
��������˻�е�۵�ĩ��ִ������ִ�������ö����Լ�������ز���������������Ԫ��
���������Ի�е�۽ṹǿ�Ƚ���������Ԫ��������֤�˽ṹ�Ŀɿ��ԡ�
����2.ͨ�������������˻�е�۵��˶�ѧ���������ſɱȾ������ڱ�����������֤�������������ȷ�ԣ�Ȼ�������˶�ѧ�����⡣�������ؿ��巨�õ��˻�е���ܹ�����Ĺ����ռ䡣�����ʵ��ά���ռ���жԱȣ��������Ҫ��
����3.ͨ��������շ������˻�е�۵Ķ���ѧģ�Ͳ�����˶���ѧ���̣����ڶ���ѧ���������Ի�е�۽��ж���ѧ����������ó���е�۸��ؽڵ��������ر仯���ߣ�Ϊ����ͼ��ٻ���ѡ���ṩ������ָ������Ϊδ����е�۵ļӹ���������˼������顣
�����ؼ������й����乤������ѣ����㣺ά����е�ۣ��ṹ��ƣ��˶�ѧ������ѧ

Abstract
����The eaviroument inside the fusion reactor has strong radiation, high plutio andhigh toricity, s0 it is nesesay to use rermote handling tochnology to replace human tocomplete the mainenance work. Remote handling system bhas been developed into aessential subsystm of the fure fusion reactor. For the CFETR of the future fusionreactor, the owerall maintenance design was adopted into the blanket maintenancescheme.which requires the upper lifing mechanism and the lower multi-functionadtransport platform to jointy complete tbe blanket transport. Prior to transport, thebotom of the blanket is connected to the vacuum vessel support through the lockingpin, so a muli-functioal maintenance manipulator system for the removal of thelocking pin at the botom of the banket neds to be developed.
����Aiming at the diasembly problem of locking shaft pin at the botom of CFETRblanke, this paper designed the conctete structure of mulifunctional manipulator thatcan disassemble locking shaft pin on the basis of flly ivesigating the status of hemainternanoe scheme design of tokamak device blanket module a domesic andoverscas sand its feasibility was analyzed. The problems of reodundant deaign, structuraldesign, kinecmatics and dyuamics analysis and sinoulatio verification of CFETRbottom maintenance manipulator wee solved under the conditioa of nartow motionspace. The specifice worck content is as fllows.
����1. By investigating the current desigm scheme of blanket maintenance for fusiondevice at domestic and abroad, the specifc space size at the bottom of the blanket ofCFETR was analyzed, and vanious manipulator with dfferent structures was compared.Three manipulasors with different structures were designed, the advantages anddisadvantages of the three structures were compared, and he most appropriate jointcoordinate structure wa slected finally. Acording��the sctual required workingcondition of the blanket, the design of increasing the mobile fredom at the bottom ofthe manipulator ws erried out. On this basis, be ed-fetore,p ffcer objects andother related components of the manipulator were designed. Based on finite elementsoftware, the finite element analysis of the manipulator structure strangth is crried outto verily the rliability of the structure.
����2. Tbe forvard and inverse kinematics solutions and Jacobian matix of the manipulator were solved by analytical method, and tbe corctnes of the forward andinverse soluions was verifed by progranming software. Then, the working space thatthe manipulator can reach was obtained by Monte Carlo method using the kimematicspositive solution. Compared with tbe acual maintenance space of the blanker, theresults meet the requirements.
����3. The dynamie modeal of the manipulator was establisbed by Lagrange methodand the dynamie equation was solwed. Based on the dynanic analysis sotware, thedynamie simulation analysis of the manipulator was carried out The variation curve offorce and torque of each joint of the manipulator were obaimed, which providedtheoretical guidance for the seltio of moor and reducer, and accumulaes tchnicalexperience for the fure processing and manufacturing of the manipulator for tokamakreactor.
����Key Words: CFETR; Blanket; Msinenance manpulaor; Stuctural design; Kinematic;Dynamie
Ŀ¼
����1����
���������������IJ��Ϸ�չ������������Դ�IJ���������������Ļ�����Ⱦ�������������ʶ�������Դ����δ����������Դ��Ҳ��δ�����п��ܽ����Դ����ķ�ʽ֮һ1.
�����ҹ��ں������ʶ����һ�㣬��������60�����ʼ�о��˾۱����ġ�֮���ֻ�����������Ⱥ˾۱䷴Ӧ��ITERE��Intemational Thermonusclear ExperimentalReactor�����о���������90�����ʼ�о��п�����41 ��Tokamak�����������귢չ��
����Ŀǰ���й���ѧԺ�������������о����е����й��۱乤�������CFETRIB-N��China Fusion Enginering Test Reactor����Ŀ���ڻ�����չ����Ŀ�ľ���������ITER��ŷ��ʾ����DEMO �� European Demonstration Power Plant�� ֮��IJ��1��Ȼ���������Լ��ľ۱䷴Ӧװ�ôӶ���þ۱��ܡ�
����CFETR�����й����У���о����1013���ܵ����µȸ�����ĺ��",����ʱ����о�������ڶ���ά��ʱ��Ҫ����ң����RHI4I ��Remote Handling��ά��ϵͳ��ң����ά��ϵͳ��Ҫ��ͨ�������˴�����ȥ���- -Щ�����ļ�顢��ж��װ�䡢�ǽӵȹ����Ӷ�����۱�����к��ж����ʶԲ�����Ա���˺�1".
�������У���о��������ģ��1-16���ײ��Ķ��ά����е��7��ң����ά��ϵͳ��һ�����֣�������Ҫ���þ��Dz������ײ�����������ʹ����ģ���ܹ�˳��ת�˳������4.���ǣ����ھ۱������������Ŀռ�ʮ�����ޣ�����ܻ��ʱ���ά��ʱͨ����Ҫͨ�����ӵ����̲�������������ԶԻ�е�۱����Ľṹ����С�˶��滮���ŷdz��ϸ��Ҫ����Ҳ������ƻ�е��ʱ��Ҫ������ѵ����⡣
����1.1 �����о���Դ�� ����
����1.1.1������Դ
�����������о������ݻ��ڹ��Ҵ��ѧװ����Ŀ���й��˾۱�������ؼ�ϵͳ�ۺ��о���ʩ���о����������ڡ������ش�Ƽ�������ʩ����"ʮ����"�滮�����ѧ������Ŀ���۱�������ؼ�ϵͳ�ۺ��о���ʩ-ң����ά��ƽ̨��
����1.1.2���ⱳ��
�������粻��������Դ�����ȱ������£�������- -����Ϊ�۱�����δ����������Դ��������������ʵ���Ĵ��������Ͷ��۱�װ�õ��о��С��й��۱乤��ʵ��ѣ����ҹ�������ƺ����Ʋ����Ϲ��ʺ������ش�Ŀ�ѧ����91.��Ŀ��ּ�������ҹ��۱����о�������ITER��DEMO�IJ�࣬����ʵ�־۱������á�
�����^���������ֱ�����Ϊ��ͨ�������п����˾۱��֮·�ϱ���Ҫ����Ĺؼ�����֮-����ң����֮���������Ҫ������Ϊ�����Դ�����ȥ���-Щ�Ƚ�Σ����������ɵĹ�����ң������һһ�����ѧ�ƶԽӲ��Һܸ��ӵ�ϵͳ���̣��漰����
�������ˡ��˶�ѧ�����������ռ����������ѧ������·���滮�ȡ�
��������ģ���Ǿ۱����������õĺ������壬����Ϊ�Ǻ������壬�����ھ۱�װ������ʱ���������Ҳ�����ģ���һ���� �Ƶİ����^����ά��ϵͳ��Ȼ����Ҫ��
��������ң����ϵͳ�ַ�Ϊ�����װϵͳ����������ϵͳ������ת��ϵͳ��������ά��ƽ̨��ά�����ߡ�������������ƶ�ܻ�е�ۡ�Һѹ̧��ϵͳ����ɡ�
�������а������Ķ��ά����е�����ڻ�����ά��ƽ̨�ϣ���Ҫ�����װ����ģ��ײ��������������DZ�����Ҫ���о����ݡ�
����1.2�������о���̬
�����п����ˣ�Tokamak���� ��ǰ������ѧ����������50�������ģ������j����Լ���������壬���������ϸߵ��¶�ʹ�䷢���۱�{.������ʮ��ķ�չ���п�����װ�õ��о�����ȡ���˽ϴ�Ľ�չ��Ŀǰ��ע�Ƚϸߵ���ITER��DEMO���ҹ���CFETR.ͬʱ�������п�����װ�óɳ��Ļ�����ά��ϵͳ-�۱�Ѱ���ң����ά��ϵͳ���о�ͬ��ȡ�ýϴ��չ��
����1.2.1 ITER ����ά����״
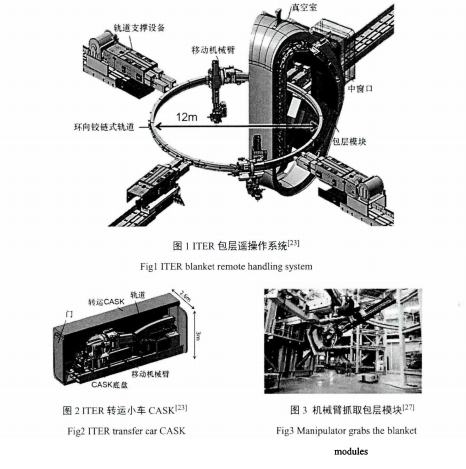
���������Ⱥ˾۱�ʵ���ITER�������ϼ��������ͬ���뽨��ġ������п�����װ�ã������ң����ά��ϵͳ��ͼ1��ʾ��
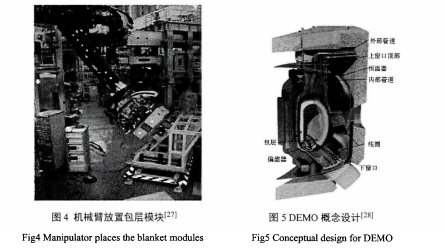
������������ά��ϵͳ��Ҫ���������������ڻ��������ƶ��Ļ�е�ۡ���������֧��װ�á��ڶ���ģ�����ά��ʱ�����ȴ�װ�õ��д��ڽУ�װ���Ź�����ƶ���е�۵�CASK12���ŵײ��ĵ�����д��ڽ���װ���ڲ�����ͼ2��ʾ�����ι��һ��12�ڣ��м�ͨ����������ӻ������ӡ�����ʱ�����۵��������ת��С��CASK��ʹ��ʱ�������- - �����ʣ����Ӻ�ͨ��֧��װ��֧����������ʱ�ƶ���е�ۿ������Ź��360���ƶ�����е�۵�ǰ��װ��һ��ִ����������ץȡ��Ҫά���İ��㡣��ͨ������������ת�˳�����ҡ�
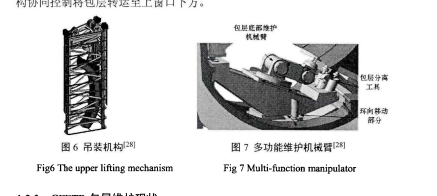
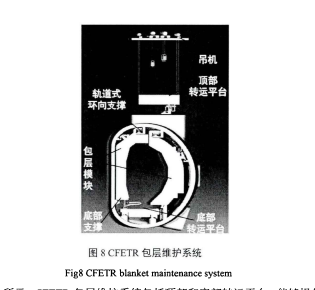
������ͼ3��ʾ����ά����е��ץȡ����ģ���ʵ��ͼ����е��ͨ��ִ����ץ����㣬Ȼ�����Ż������ƶ�����ͨ����е��β������ת�ؽڵ��ڻ�е�۵�λ�ˣ�������ת�˵����ʵ�λ�ã�������ר�ŵ�ά�������ϣ���ͼ4��ʾ��
����1.2.2 DEMO ����ά����״
����ŷ��DEMO����ITER�Ļ����Ͻ�����-һ������ʾ���ѣ�Ŀǰ�Դ��ڸ�����ƽΣ������ά��ϵͳ�����ITER������ͬ��
������ͼ5��ʾ�������ϲ������и��ֹܵ���ά��ʱ��Ҫ���г��ܵ����²���ƫ����1242����ά��ʱ��Ҫ�Ƚ�ƫ�����Ƴ�����ҡ�
������ͼ6��ͼ7��ʾ������ά��ϵͳ���������֣��ϲ��� ��װ�������²�ά����е�ۡ�ά��ʱ��װ�������Ӱ����ϲ���ά����е�۸���֧�Ų�ж�Ͷ�ס����ײ������װ����Эͬ����������ɵ�������������������ҷ��ð���ά�����С�
�������еײ���ܻ�е�۰�װ�ڶ��ƽ̨�ϣ�-���������ɶȣ����϶��ƽ̨�Ļ����ƶ�һ���ĸ��� �ɶȡ�����ʱ�Ȳ��ƫ������Ȼ��ͨ���´��ڽ����ƽ̨���룬��е�ۿ�ʼ�������ײ���һЩ����װ�ã� ͬʱ�ϲ���װ������ʼ�������ڰ����ϲ����ӣ��������Ȼ���ܻ�е�۶�ס����ײ������װ����Эͬ���ƽ�����ת�����ϴ����·���
����1.2.3 CFETR ����ά����״
����CFETR���ҹ���һ-�εĺ˾۱�װ�ã��Ǿ۱���ʵ�����õ���Ҫ-����Ŀǰ���ڸ�����Ƶĺ��ڽΡ����İ���ά��ϵͳҲ�Ǿ���һ����- -���������Ľ�������ά�����Բ�û�д�ĸı䣬����ͨ���ϲ���װ�����͵ײ����ƽ̨����е��Эͬ���������ά����
������ͼ8��ʾ��CFETR����ά��ϵͳ���������͵ײ�ת��ƽ̨���ܹ��ṩ�����ƶ��Ĺ��ʽ����֧�š������ĵ�װϵͳ��
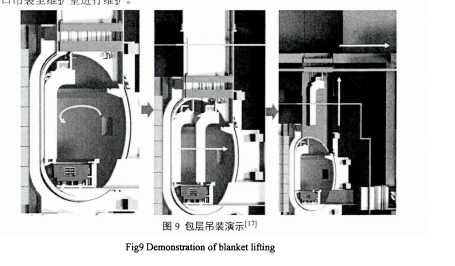
������ͼ9��ʾ����һ�������İ����װ�Ĺ��̡��� ���ĵ�װ����������ϲ����ӣ��ײ��Ķ��ƽ̨�����ײ����ӡ�ͨ��Эͬ�����Ƚ����㻷���ƶ�����װ�����·���Ȼ�����Ŷ��ƽ̨�����ƶ�������λ�ã���װ����������ͨ���ϴ��ڵ�װ��ά���ҽ���ά����
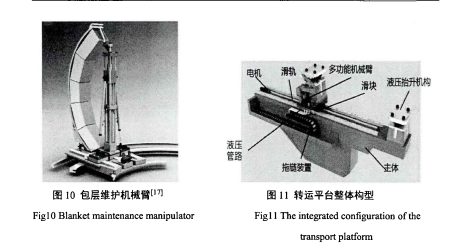
������ͼ10��ʾ����һ�����ĸ�Һѹ֧����ɵİ��㶥����е�ۡ�ά��ʱ��е�۶���������㲢ͨ���ײ��ľ���ͻ���������е�۵���������λ�ã������ϲ�����װ�����������������ҡ�֮����о��н���- -������ �˸Ľ�����ͼ11��ʾ�����ײ�װ�����ϵ�-һ��ά��ƽ̨�ϣ����ʱ�ֻ����������ײ�֧�ţ�������Һѹ̧����������Ҫ���������㡣
����1.3���ڵ�����
������CFETR����ң����ά����һ�������ھ۱���ڲ��Ŀռ��쳣��С�������ײ�����������װ��ά����е�������������⣬Ŀǰ��Ȼû�н�������Ա������ڽ��������ơ��˶��ռ���С�����µİ���ά����е�۽ṹ������˶��������⡣
����1.4 �о����ݼ��½ڰ���
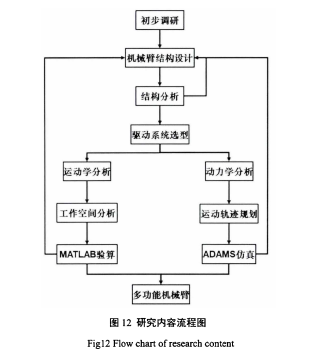
�����������о�������ͼ12��ʾ��Χ��CFETRң����ά��ϵͳ����ײ���ܻ�е�۵Ľṹ������˶����ƣ��ڵ��кͷ����Ļ����ϣ������п�����װ�ö��ص�Ӧ�û�����������ͨ��������Ƴ���ܻ�е�ۣ�������άģ�ͣ��������������Ԫ���������ݷ����Ľ���ж�����Ƿ���Ҫ�ṹ�Ż�1291;Ȼ����ά����е���˶�ѧģ���붯��ѧģ�ͣ�����MATLAB��ADAMS�������з��棬���ݷ�����������е�۵ĺ�����������ԡ�
������������-�������£������½ڵ��о����ݰ������£���1����һ�½��ܿ�����Դ���������о�Ŀ�ģ������˹�����۱�װ�ð���ά������״����ָ����CFETR����ά�����ѵ㣬Ȼ�����������о�����Ҫ���ݼ��½ڰ��š�
������2���ڶ�����Ҫ����ά����е�۾���Ľṹ��ʽ����������ͼ��ٻ���ѡ�ͣ��Լ�һЩ��е����ز����Ľṹ��ƣ�Ȼ��Ի�е�۵Ľṹǿ�Ƚ�������Ԫ������ȷ������ƵĻ�е�۽ṹ�ܹ��������Ҫ��
������3����������Ҫ���ý������Զ�ܻ�е�۷ֱ�����������˶�ѧ������Ȼ������MATLAB�������˶�ѧ����������㣬Ŀ������֤ģ�ͺ����ԣ��ڴ˻������ϣ��Ի�е�۹����ռ���з��棬����������ʵ��ά������ռ���-һ���Աȣ���֤��е�ۿɲ����ԡ�
������4����������Ҫ��ά����е�۽��ж���ѧ�������滮����е��ĩ��ִ�������˶��켣��Ȼ������ADAMS�����Ի�е�۽��ж���ѧ���棬�Դ˵ó���е�۸��ؽڵ������������أ���ڶ�����ѡ����ͼ��ٻ��ͺŶԱȣ���֤ѡ���Ƿ������
������S���������ǽ��ۺ�չ������Ҫ�Ա����о�������-һ���ܽᣬ�ҳ�����㣬��Բ��������һ-��չ����
����1.5 ������
�������½����˿�����о���Դ��������ͬʱ�����˹��������п�����װ�ð��㡣
����Ѹ����ά����������״��������ײ�ά�������˵ķ�չ�����˷�����չ����ͬʱ�����˱�����Ҫ�о�����Ҫ����
����2ά����е�����
����2.1����
����2.2�����˱������
����2.2.1�ؼ��� ��ָ��
����2.2.2��е�����幹�ͷ�����
����2.2.3�����˲������
����2.2.4����ϵͳѡ��
����2.3��е������Ԫ����
����3��е���˶�ѧ ����
����3.1�˶�ѧ������
����3.2���������
����3.2.1 D-H ������
����3.2.2��е�� �˶�ѧģ��
����3.3��е�� ���˶�ѧ���
����3.4��е�����˶�ѧ���…
����3.4.1������
����3.5.1 ���˶����ſɱȾ���
����3.5.2����ſɱ�
����3.6�˶�ѧMATLAB�������
����3.6.1 ��֤���˶�ѧ
����3.6.2��֤���˶�ѧ
����3.6.3�����ռ����
����3.7 ������
����4��е�۶���ѧ����
����4.1����ѧ����
����4.2����ѧ���̵Ľ���
����4.2.1����ѧ��������
����4.2.2�������շ�…
����4.2.3���� ���������ٶ�
����4.2.4ϵͳ�Ķ���
����4.2.5ϵͳ����
����4.2.6�������շ���
����4.2.7����ѧ����
����4.3����ADAMS�Ķ���ѧ����
����4.3.1�����ǰ����
����4.3.2����Ľ������ .
����5������չ��
����5.1 ȫ���ܽ�
�����������CFETR�����ݲ���ά��ϵͳ�������˹����Ϻ˾۱����ð���ά����һ�����������ף��ܽ������Ƶ���ȱ�㣬����CFETRǰ����ƵĻ��������ڸ�����ơ������Ż���Ƶķ���������D-H���������������ؿ��巨���������շ�����Ƴ��˰���ײ����ά����е�ۣ������˻�е�۵��˶�ѧ�������ռ䡢����ѧ���˶��켣��
����������Ҫ�о������ܽ����£�
����1.�ڲ��Ĵ������ף�����˽������۱�װ�ð���ң����ά��ϵͳ�о���̬��ǰ���£�����CFETR����ά��Ŀǰ�о���״��ͨ���Աȷ���������˰���ײ��Ķ��ά����е�ۡ���е�۵�ĩ��ִ������ִ�������ö����Լ���е����ص��������������Ի�е������ANSYS����Ԫ��������֤�˻�е�۵Ľṹǿ�ȡ�
����2.ʹ�� D-H�����������˻�е�۵�����ϵ������֤������ȷ�ԣ�ʹ�ý�����������˻�е�۵��˶�ѧ���������ſɱȾ�������MATLAB�������˶�ѧ�ļ������������㣻ͬʱ�����˶�ѧ���⣬����MATLAB,ʹ�����ؿ��巨�����˻�е�۵Ĺ����ռ䣬����ʵ��ά�����蹤���ռ���жԱȣ������ȷ��
����3.ʹ������ ���շ������˻�е�۵Ķ���ѧ���̣���ͨ�������е������ijһ ��Ķ��ܺ����ܣ�Ȼ���Ƴ���е�۵ĵĶ��ܺ����ܣ�������������ѧ���̣�
�����ڴ˻����ϣ�����ADAMS�������Ի�е�۽����˶���ѧ����������˶��滮���ó��˻�е�۸��ؽڵ��������أ�Ϊ����ͼ�������ѡ���ṩ���������ݡ�
����5.2���µ��о�����������CFETR������Ŀ��ͨ����δ���۱�Ѱ���ײ����ά����е�۵���ƺ��˶�ѧ�������ռ䡢����ѧ���˶��켣�����о��������������ơ���С�˶��ռ������¾۱�Ѱ���ײ�ά����е�ۻ�����ơ��˶�ѧ������ѧ�������������֤���⡣
����5.3�о�չ��
����������Ȼ��Ƴ��˰���ײ�ά����е�۲���������ṹ�����ԺͿɿ��ԣ������ڸ���ԭ���кܶ��û�����ơ�
�����ڻ�е�۾������ȶ��Է��棬����CFETR������ô�ģ��������ƣ�����ģ��������������ϴ���ά������������ƫ�����ᷢ����б���߸�Ϊ���صIJ෭��������۱�Ѵ���������������غ�������Ի�е�۲������ȷ���Ҫ��ܸߣ���һ����Ҫ��һ���о���
�����ڻ�е��ά���ľ������̷��棬��е���Ǽ����ڶ��ƽ̨�ϣ����ƽ̨�ͻ�е����- -�����壬����ֻ�ǶԻ�е�۱�������о�����һ ����Ҫ��϶��ƽ̨�����ۺϿ��ǣ�ͬʱ����е�۵�ĩ��ִ�й��߲�ֹһ�֣��ڹ���ʱ��Ҫ������ͬ��ִ����������������ִ������ΰ����Ա���ά������Ҳ����ϸ�滮��
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��