24小时论文定制热线
![]()
24小时论文定制热线
![]()
摘要:针对传统工业平缝机机械传动部分的自动化程度低、同步性差、精度低、易出现机械谐振以及传动机构间的齿轮同步性和精度差等特点, 本文重点讨论了工业平缝机的机械同步传动方式, 引入了多电机同步控制。分析了几种常用的多电机同步控制方法, 结合同步性能较好的偏差耦合控制。本文设计并搭建了基于单片机的三电机同步控制系统实验平台, 完成了三电机同步控制系统的程序设计以及多电机同步控制算法的验证实验。实验结果表明, 可以较好地改善系统的同步性能, 能够较好地满足被控对象对高精度同步控制的要求。
关键词:无刷直流电机; 偏差耦合; 单片机; MCU;
Abstract:In view of the traditional mechanical transmission part of the low degree of automation, industrial sewing machine synchronicity is poor and precision is low, prone to mechanical resonance and gear transmission mechanism between the synchronicity and poor precision characteristics, this paper mainly discusses the industrial sewing machine mechanical synchronous transmission mode, motor synchronization control is introduced.Analysis of several commonly used motor synchronization control method, combining with better synchronization performance deviation coupling control.This paper designed and built the three motor synchronous control system based on single chip microcomputer experiment platform, completed the three motor synchronization control system and program design of synchronous control algorithm validation experiments.The experimental results show that can better improve the synchronization performance of system, can well meet the requirement of high precision synchronous control of the object.
Keyword:brushless DC motor; deviation coupling; single chip microcomputer; MCU;
工业平缝机是服装加工业中使用最为频繁的机种。研究开发自动化程度高、缝纫质量可靠和技术先进的工业平缝机, 对整个服装加工产业的发展具有一定的推动作用。目前, 工业平缝机各个运动单元之间的同步控制普遍采用机械同步方式, 即各个运动机构通过机械结构耦合到总轴上, 实现运动的同步性。工业平缝机局部机械结构示意图如图1所示。
这种同步控制虽然能较好的实现同步运转, 但仍存在一些不足:电机驱动总轴, 分轴输出力矩减小, 带负载能力有限;轴、皮带等传动机构影响同步精度;总轴容易出现机械谐振等[1]。鉴于以上原因, 将工业平缝机的机械同步控制结构改为多电机同步控制, 即将皮带和齿轮去掉, 上轴、下轴和旋梭轴均单独由电机驱动。
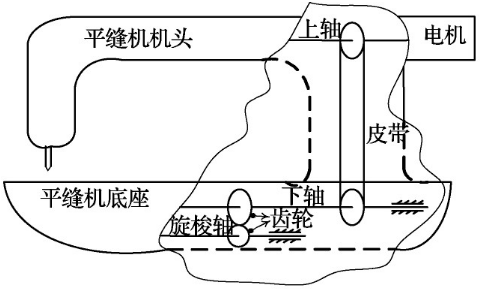
图1 工业平缝机局部机械传动结构示意图
工业平缝机改为电传动结构后, 面临的主要技术难点就是协调3台电机之间的转速保持同步, 由此则引出了本文的主要研究内容, 即多电机同步控制方法研究。
1、常用多电机同步控制方法
针对3台电机之间的同步控制, 目前常用的方法主要有电子虚拟总轴控制方式、偏差耦合控制方式和相邻偏差耦合控制方式等。
1.1、电子虚拟总轴控制方式
Lorenz、Meyer等人最早于1999年提出了这种控制方式[2], 后来Valenzuela和Lorenz等人对其结构、算法进行了改进和完善[3], 其控制系统如图2所示。
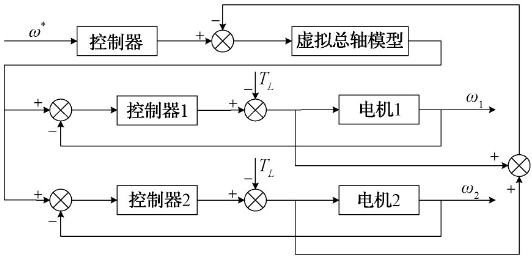
图2 电子虚拟总轴控制方式
电子虚拟总轴方式的实质是模拟机械同步控制方式中的机械总轴。系统的输入信号经过虚拟总轴的处理之后, 得到各控制器所需的参考信号, 并且被各控制器所跟踪。这种方式在系统负载发生扰动的过程中, 会产生传动轴的失步现象[4]。
1.2、偏差耦合控制方式
偏差耦合同步控制方式[5]的主要思想是将某一台电机的速度反馈同其他电机的速度反馈分别作差, 然后将得到的偏差相加作为该电机的速度补偿信号, 其控制系统框图如图3所示。
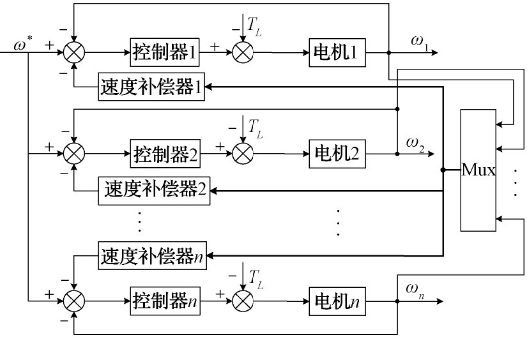
图3 偏差耦合同步控制系统结构
图3中, 速度补偿器作为耦合单元, 使得任何一台电机都能响应其他电机的转速变化。以电机1的速度补偿器为例, 其原理框图如图4所示。增益Kr的作用是协调各电机之间的转动惯量[6-7]。
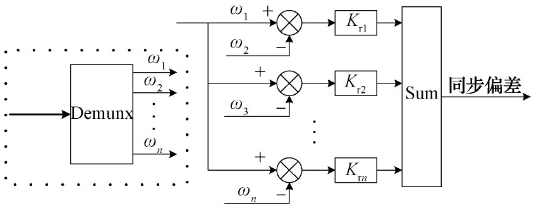
图4 速度补偿器模块原理
这种控制方式适用于当电机数目≥3的同步控制系统, 尤其是在3台电机的同步控制系统中同步性能较好。但由图4可知, 随着系统中电机数目的增加, 需要比较作差的电机速度值就会越多, 计算量大, 整个系统的结构也越发复杂[8]。
1.3、相邻偏差耦合控制方式
Shih等最早于2002年提出了这种控制方法[9], 其控制思想是任意一台电机除了自身的跟踪误差外, 只响应与之相邻的两台电机的速度偏差。系统控制结构如图5所示, 图中ε1n为第一台电机与第n台电机之间的同步误差, ε12为第一台电机与第二台电机之间的同步误差, 以此类推, 可知ε21, ε23为第二台电机与相邻电机之间的同步误差等。第n台电机的控制器结构如图6所示, 其中C1、C3为同步偏差控制器, C2为电机跟踪误差控制器。
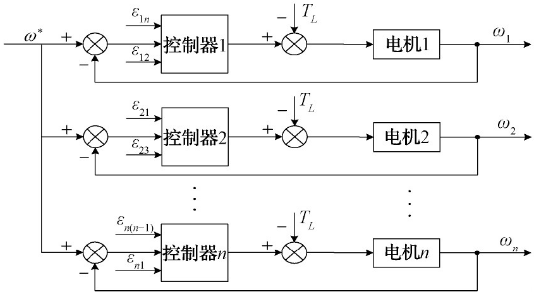
图5 相邻偏差耦合控制系统结构图
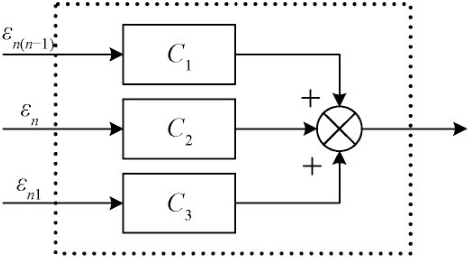
图6 第n台电机控制器结构
文献证明了相邻偏差耦合控制算法的收敛性和稳定性。当电机数目小于4台时, 每台电机控制器比较作差的计算量与偏差耦合控制方式相当, 当电机数目大于3台时, 系统的计算量比偏差耦合控制方式小, 且结构简单[10-11]。
通过对以上各种方法的分析, 结合工业平缝机的改进方案, 选择偏差耦合控制方式作为三电机同步控制的方法。建立系统模型, 进行仿真分析。
2、基于单片机的电机控制系统硬件设计
电动机控制器选用89C52[12]来实现, 各个功能都通过软件编程实现, 高性能、易控制的控制器将使系统可以满足各项指标要求。
工业缝纫机伺服控制系统即是对直流无刷电机的速度控制系统。硬件设计如图7所示, 功率模块IGBT进行功率驱动控制。
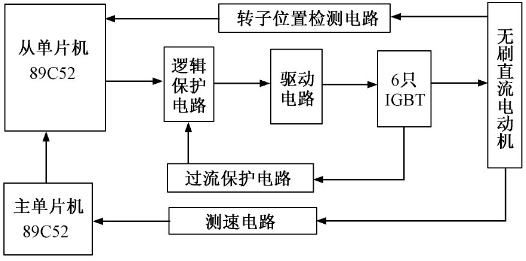
图7 硬件系统结构
单片机输出的PWM信号不能直接驱动电机运行, 需要进行转换, 使用驱动器将其转化成可驱动电机的驱动信号。这里选用IR公司的IR2130, 此芯片为三相逆变器驱动器集成电路, 适用于变速电机驱动器系列。其特点为0∶600V集成电路, 门极驱动电源10~20V, 内置过电流比较器隔离的高/低端输入, 为了减小驱动电路对控制系统的影响, 加入了光耦器件TLP2630。
单片机产生的PWM波形经过光耦隔离后直接驱动6只IGBT管, 功率管按照V1+V6、V1+V2、V3+V4、V3+V2、V5+V6、V5+V2的相序组合方式进行开关, 如图8所示, 电动机每转一周经过6次换相, 电流根据导通的功率管不同, 按照不同方向流经电机不同的线圈, 由此产生持续的旋转磁势, 推动电机的转子转动。
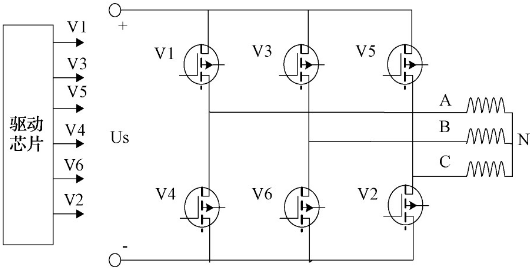
图8 三相全控桥驱动电路
3、速度控制算法
目前电机的转速测量已经有很多方法, 常见的有测速发电机和光电数字测速等方法。
测速发电机[13-14]是一种较早的测速方法, 利用发电机的输出电压与转速成正比的原理, 在电机轴上安装一台小型发电机, 根据输出电压, 间接获得被测电机的稳态转速和转速规律。如进行低速测量时经常会进入非线性区而产生很大误差[15]。
光电数字测速器则利用转速传感器产生的信号进行测速有测频法和测周法两种方法。
其中测速公式为:

从式 (1) 可见, 改变供电频率f、电动机的极对数p及转差率s均可达到改变转速的目的。
本文则采用光电编码器进行转速测量, 使用M法进行检测, 测量时编码器输出两路相位相差90°的脉冲信号, 通过测量一定时间内编码器脉冲个数来获得速度值。转速如下:

并采用增量式PID进行控制。
P调节提高系统响应速度, I调节消除稳态误差, D减小系统超调量, PID增量型控制算式为:
式中:u (k) 为PID调节增量, k为时间序列号, Kp为比例系数, Ti为积分时间常数, Td为微分时间常数, T为采样周期, k为偏差信号, u (k) 为PID调节输出信号。
4、系统程序设计
在实际实验系统中, 每隔60ms对各电机转速的跟踪误差进行PID调节, 每隔120ms对3台电机进行一次同步转速误差调节。多电机同步控制系统的主程序流程如图9所示。
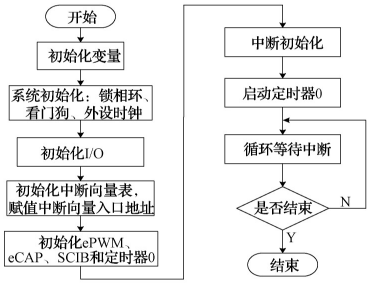
图9 主程序流程
5、实验结果
实际实验中, 当电机供电电压为15V时, 根据电机的实际情况, 选择电机有效的调速区间为[1 000r/min, 4 000r/min], 进行系统同步性能实验。由于受电机自身条件影响, 转速输出具有一定的波动, 因此, 实验过程中采集一段时间内的转速平均值[16-17]。通过上位机软件, 采集到的转速数据如表1所示。
表1 3 台电机转速采集数据
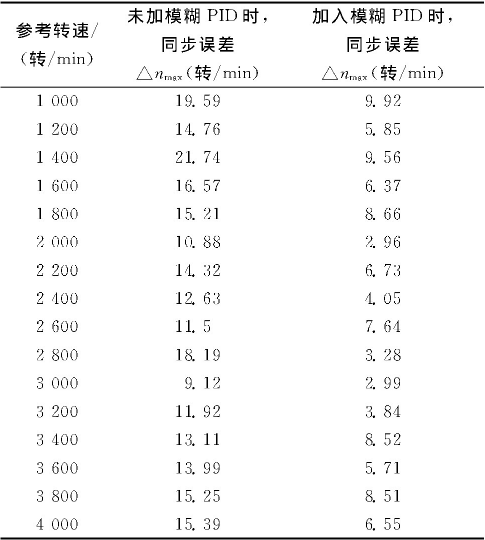
由上表中3台电机的转速数据, 得出在不同参考转速时的系统最大同步误差△nmax, 将实验测得的两组不同情况下的最大同步误差进行比较。
6、结论
通过表1可以看出, 模糊PID补偿环节可以减小系统的同步误差, 提高系统的同步精度, 与前面同步控制算法仿真实验结果一致。由此可以说明, 本文所采用的基于模糊PID补偿的偏差耦合控制算法可以有效改善多电机控制系统的同步性能。因此, 本文研究的多电机同步控制方法可以适用同步控制精度要求更高的场合, 为实现多电机同步控制技术在工业平缝机中的应用奠定基础。
参考文献
[1]田福祥.先进的电子总轴技术及其应用[J].青岛建筑工程学院学报, 1990, 11 (2) :30-34.
[2]李云辉.永磁同步电机相电流重构技术研究[D].哈尔滨:哈尔滨工业大学, 2014.
[3]陈世坤.电机设计[M].北京:机械工业出版社, 1990:158-164.
[4]吴其华, 徐邦荃.多电机同步传动控制系统分析[J].兵工自动化, 2003, 22 (1) :20-24.
[5]杨楠, 王伟.基于LabVIEW的新式PID控制算法机能剖析[J].电子测量技术, 2015, 38 (11) :74-78.
[6]曹玲芝, 王红卫, 李春文, 等.基于偏差耦合的起重机起升机构同步控制[J].计算机工程与应用, 2008 (25) :233-235.
[7]杨晨娜, 张怡.双电机同步控制系统的设计与仿真[J].工业控制计算机, 2009, 22 (1) :36-37.
[8]喻鹏, 齐蓉.多无刷直流电动机偏差耦合同步控制[J].微特电机, 2008, 36 (4) :42-45.
[9]张继, 徐克军.矢量控制电动机执行器死区补偿新方法[J].电子测量与仪器学报, 2015, 29 (2) :272-281.
[10]张承慧, 石庆升, 程金.一种基于相邻耦合误差的多电机同步控制策略[J].中国电机工程学报, 2007 (15) :59-63.
[11]何清华, 曾益昆.基于模糊PID的液压同步控制[J].矿山机械, 2001 (2) :59-60, 5.
[12]夏长亮.无刷直流电机控制系统[M].北京:科学出版社, 2009:25-44.
[13]蒋海波, 崔新艺, 曾凌波, 等.无刷直流电机模糊控制系统的建模与仿真[J].西安交通大学学报, 2005 (10) :1116-1120.
[14]黄卫华, 方康玲.模糊控制系统及应用[M].北京:电子工业出版社, 2012:56-65, 83-125.
[15]李洪兴, 王加银, 苗志宏.模糊控制系统的建模[J].中国科学 (A辑) , 2002 (9) :772-781.
[16]吴雪梅, 景占荣, 史永奇.基于DSP的直流无刷电机控制技术研究[J].机械与电子, 2005 (3) :50-52.
[17]景小萍.基于矢量控制的PWM整流器研究[D].焦作:河南理工大学, 2010:23-30.