在本系统中,将电缆夹板运行负荷、运行方向与采煤机运行参数匹配,并纳入整个采煤控制系统中。当采煤机运行时,智能拖缆装置自主跟随采煤机移动,保证了电缆夹板在电缆槽中始终处于平铺状态,不掉道,不堆叠,不憋卡,无需工人跟踪维护,实现了减人增效,进一
以下为本篇论文正文:
摘要:为适应煤矿安全生产和高产高效发展的需要,设计了一种采煤机智能化拖缆系统,即对机械传动系统、电控系统、采煤机行走机构做了改进,重点介绍了该系统的组成结构和实现方法。经推广应用,该系统实现了减人增效,进一步提高了综采设备的自动化水平。
关键词:采煤机;智能化;拖缆
0引言
采煤机是实现煤矿生产机械化和自动化的重要设备之一,它是集机械、液压、电气为一体的大型复杂设备,如果出现故障将会导致整个采煤工作的中断,造成巨大的经济损失[1].在我国现有的采煤方式中,电缆夹板与采煤机仅有启、停上的逻辑连锁,没有方向及负荷上的调节配合,电缆夹板经常存在憋卡、折返严重而卡断等问题,尤其在薄煤层工作面斜切进刀和机头机尾清浮煤时,此问题尤为突出,经常造成采煤机电缆夹板掉道或电缆挤伤,从而影响生产,造成经济损失。
另外,随着我国综采工作面智能化少人或无人工作面的进一步实施[2],对拖缆系统安全可靠性提出了更高的要求,西安煤矿机械有限公司根据发展和应用的需求,开发设计了一套采煤机智能化拖缆系统。
1智能化拖缆系统组成
智能化拖缆系统由机械传动系统和电气控制系统组成,同时需要改进采煤机行走机构[3-4].
1.1机械传动系统
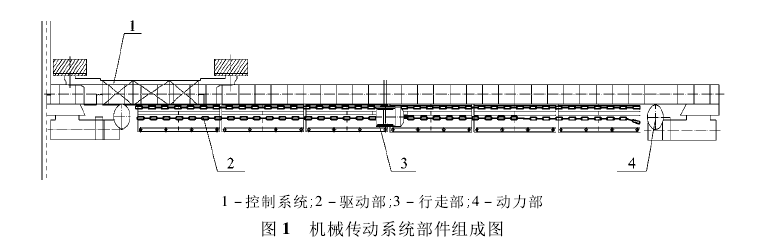
智能化拖缆系统的机械传动系统由行走部、传动部、动力部等组成,如图1所示。
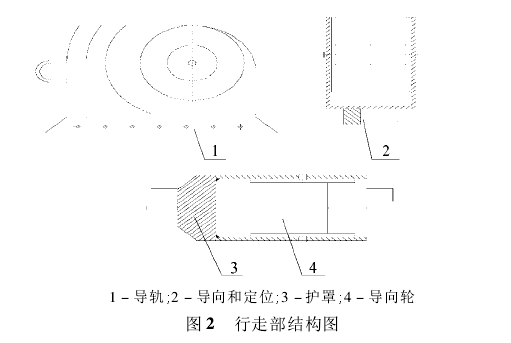
行走部主要作用是拖动电缆夹板行走,并起夹板导向作用。行走部由导向轮与支撑护罩构成,连接在运输机的轨道上与链条连接成刚性整体。电缆夹板通过导向轮进行转动行走。行走部结构如图2所示。
传动部主要由链轮、链条等传动元件组成,带动行走部运行。
动力部由驱动电动机、减速器等组成,是整个拖缆装置的动力源。
1.2电气控制系统
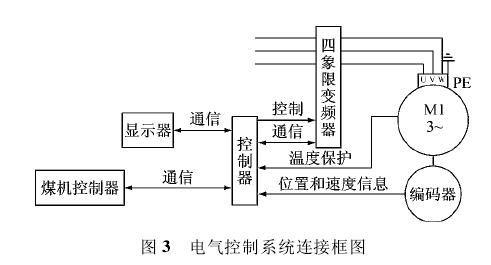
智能化拖缆系统的电气控制系统由控制器组件、显示器、四象限变频器、三相交流异步电动机、编码器组件等组成,如图3所示。
控制器组件由CPU单元、I/O模块、CAN总线模块单元、RS-485/422通信单元、模拟量采集单元、温度变送模块组成,其负责控制变频器运行,采集变频器运行数据,采集电动机数据和运行状态,采集编码器数据,计算和控制拖缆装置位置与运行速度,并与采煤机和显示器进行数据通信等。
变频器驱动电动机运行,监控动力部负荷及运行状态,控制行走部根据采煤机位置和速度信息实现自主跟随,实现设备之间的均衡作用。
编码器组件由高分辨率的多圈绝对值编码器、联轴器、安装护套等组成,安装于动力部,用于测量拖缆装置行走部的运行速度和实时位置。
1.3采煤机行走机构改进
采煤机行走机构需增加设计编码器组件,用于检测采煤机在工作面的相对位置及实时精准速度。
2系统实现
2.1工作面布置
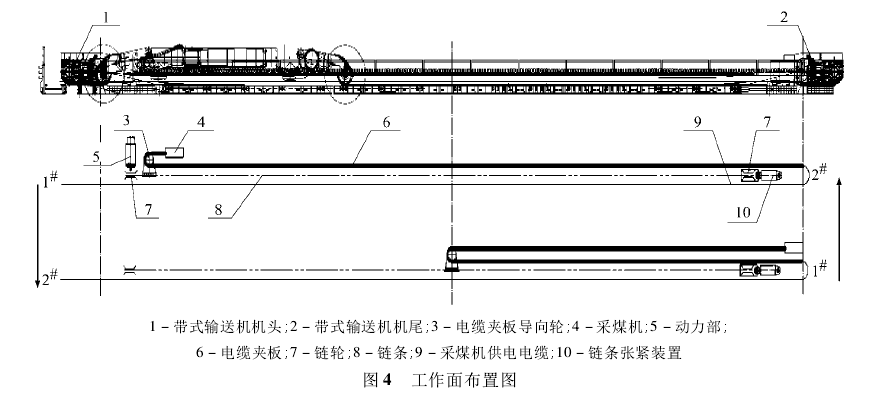
智能化拖缆装置和采煤机在工作面的布置图如图4所示,在运输机的机头安装拖缆动力部,在电缆槽机头和机尾安装链轮、链条。将采煤机运行到机头处,根据采煤机拖缆链的位置,将电缆夹板导向轮与链条连接。
根据工作面的布置情况,电缆夹板布置的长度应为工作面的一半,链条张紧装置应在工作面中部布置,但是由于链条张紧装置尺寸比较大,只能在机尾布置,电缆夹板要布置全部工作面。
2.2实现方法
1)工作面最初布置时,采煤机与电缆夹板导向轮的相对位置应该为采煤机在工作面机头,导向轮也应该在机头。
2)采煤机控制器除控制采煤机正常工作外,还需通过采煤机行走机构的编码器组件实时采集采煤机的速度及牵引状态等信息,对其运算处理后传送至拖缆装置控制器。
3)拖缆系统的运行速度为采煤机运行速度的1/2,拖缆装置控制器负责控制该装置正常运行,能实时跟随采煤机牵引状态,并且根据采煤机牵引方向与拖缆装置负载情况实时微调跟随速度,使装置安全稳定运行。同时实时采集该装置位置信息、速度信息、运行状态和负载状态等信息,运算处理后传送至采煤机控制器。
4)拖缆装置控制器与采煤机控制器采用CAN总线实现双向高速实时通信,并实时检测通信状态,当通信中断后双方立即停止运行并发出报警信息。
2.3工作过程
当采煤机从工作面机头向机尾开始工作时,采煤机拖拽电缆夹并发出信号,拖缆系统动力部工作,电缆夹板导向轮运行,电缆夹板与导向张紧轮同时运行。由于电缆夹板导向轮的移动速度是采煤机速度的1/2,当采煤机运行到机尾时,拖缆架则移动到运输机的中部。在这个运行过程中,电缆夹板的运行是以采煤机为动力,导向轮起辅助张紧作用。
当采煤机从工作面机尾向机头工作时,采煤机发出信号,拖缆系统动力部工作,电缆夹板导向轮拖拽电缆夹板,当采煤机运行到机头时,导向轮则移动到运输机的中部。在这个运行过程中,电缆夹板的运行是以拖缆系统为动力,采煤机起辅助张紧作用。
3结语
在本系统中,将电缆夹板运行负荷、运行方向与采煤机运行参数匹配,并纳入整个采煤控制系统中。当采煤机运行时,智能拖缆装置自主跟随采煤机移动,保证了电缆夹板在电缆槽中始终处于平铺状态,不掉道,不堆叠,不憋卡,无需工人跟踪维护,实现了减人增效,进一步提高了综采设备自动化水平。
参考文献:
[1]王文杰,刘文举,帅银周。高产高效矿井开采技术与装备现状及发展趋势[J].煤矿机电,2013(2)。
[2]孙永锋,王亮,党景锋。薄煤层无人工作面采煤机关键技术及实现方法[J].煤矿机电,2012(5)。
[3]刘文田。基于CAN总线的开关磁阻电动机双机同步控制技术研究[J].煤矿机电,2015(1)。
[4]任朋飞,刘志明,王勃。CAN总线技术在采煤机应用中的问题分析与处理[J].煤矿机电,2015(3)。