24小时论文定制热线
24小时论文定制热线
摘要
平面连杆机构的尺度综合一般采用图谱法、图解法或优化设计等方法。图谱法求解精度低,图解法效率较低,优化法分析过程和算法原理复杂。针对这些问题,现对瓦特 II 型平面六连杆停歇机构,寻求更加高效和精确的机构尺度综合方法,并应用于少梳栉经编机成圈运动装置的设计。
分析了平面六连杆运动链的类型,以及对应不同类型机构,其中,瓦特 II型能实现一次停歇,且其为 II 级机构,结构最简单。分析了瓦特 II 型平面六连杆机构的停歇原理。其有四种死点(极限)位置情况,即外死点-外死点、内死点-外死点、外死点-内死点和内死点-内死点,当第一、二级四连杆机构的主动连架杆与相应连杆处于共线或重叠位置附近时,机构从动连架杆实现近似停歇。
利用图解法对瓦特 II 型平面六连杆停歇机构进行尺度综合,对四种死点情况,每种情况又有两种预设条件,即预设第二级四连杆机构从动连架件或运动输出杆的位置与杆长,利用主动曲柄停歇转角大小、从动输出杆摆角范围和极限位置几何关系,求解出第二级四连杆机构运动输入杆或从动连架杆的位置及杆长。
以图解法为基础,利用解析法推导出瓦特 II 型平面六连杆停歇机构中的相关定量关系表达式,按两种预设条件,分别得到两种结果:第一级四连杆机构运动输出杆和第二级四连杆机构运动输入杆之间的夹角、第二级四连杆机构中运动输入杆和连杆的杆长、第二级四连杆机构中的连杆杆长和从动连架杆的杆长。
将解析法应用于 RS6EL 型少梳栉经编机成圈机构的尺度综合,分析了成圈编织工艺,得到运动要求为:槽针和针芯作一次停歇的上下运动,停歇时间分别是107° 和120° 及动程分别是 14 和 8mm,沉降和梳栉作一次停歇的往复摆动,停歇时间分别是109° 和37° 及动程分别是 4.5 和 19mm。选择机构结构类型,其中,槽针为六连杆机构,针芯、沉降和梳栉均为八连杆机构。综合出机构尺度并进行运动分析,得出槽针、针芯、沉降和梳栉运动机构的停歇时间分别为106 .6°、119 .5°、109 .4°和37 .4°,与要求相比,相对误差分别为 0.56%、0.42%、0.55%和 1.1%,运动动程分别为 14.4、8.3 、4.6 和 19.5mm,与要求相比,相对误差分别为 2.9%、3.75%、2.2%和 2.6%。
关键词 : 平面六连杆机构; 停歇;尺度综合;经编机;少梳栉
ABSTRACT
The method of atlas, graphic or optimization design is usually used in the dimensional synthesis of planar linkage mechanism. The accuracy of the atlas method is low,the efficiency of graphic method is relatively low,the optimization method and the algorithm principle are complex. In order to solve these problems, a more efficient and accurate mechanism dimensional synthesis method for Watt II six-bar linkage dwell mechanism is explored and applied to the design of loop motion device of the less comb warp knitting machine.
The types of six-bar linkage kinematic chains were analyzed, as well as corresponding to different types of mechanism, Watt II can achieve a dwell, Watt II six-bar dwell mechanism is generally II level mechanism and its structure is simplest.
The dwell principle of Watt II six-bar linkage is analyzed. It can be classified as four kinds of dead point(limits)positions, that is outer-outer, outer-inner , inner-outer and inner-inner dead points,when the active connecting linkage and corresponding connecting linkage of first, second level four-bar linkage in the vicinity of collinear or overlapping position, the approximate dwell of the mechanism follower connecting linkage realized.
Dimensional synthesized of the Watt II six-bar dwell mechanism with graphic method , in the case of four kinds of dead points, there are two preset conditions in each case , namely the position and length of follower connecting linkage or moving output lingkage of second level four-bar linkage mechanism were preseted, the size of the active crank dwell angle, the swing angle range of the follower output linkage and the geometric relation of the limit position were used, and the position and length of the moving input lingkage or follower connecting linkage of the second level four-bar linkage mechanism were solved.
On the basis of graphic method , related quantitative relation expressions of Watt II six-bar dwell mechanism were directly derived through the use of analytical method, according to the two preset conditions, two results were obtained: the included angle between the moving output linkage of first level four-bar linkage and moving input linkage of second level four-bar linkage,the length of moving input linkage and connecting linkage of second level four-bar linkage,the length of connecting linkage and the follower connecting linkage of second level four-bar linkage .
The analytic method is applied to the dimensional synthesis of the loop forming mechanism of RS6EL less comb warp knitting machine. The loop knitting process is analyzed, the movement requires obtained: groove pin and closing element had upper and lower linear motion with a dwell, dwell time were 107° and 120° and moving range were 14 and 8mm respectively, sinker and guide bar had reciprocating swing with a dwell, dwell time were 109° and 37 and moving range were 4.5 and 19mm respectively. The structure of the moving mechanism was selected, and the groove pin was six-bar linkage, and closing element, the sinker and the guide bar were all eight-bar linkages. The mechanism scale was comprehensived and motion analyzed, the dwell time of groove pin, closing element, sinker and guide bar movement mechanism were106 .6°、119 .5°、109 .4°and 37 .4°, compared with the demand, the relative error were 0.56%, 0.42%, 0.55% and 1.1% respectively, moving range were 14.4, 8.3, 4.6 and 19.5mm, compared with the demand, the relative error were 2.9%,3.75%, 2.2% and 2.6% respectively.
Key words: Six-bar linkage; Dwell; Dimensional synthesis; Warp knitting machine;Few guide bar
平面连杆机构是由若干个构件通过低副(转动副、移动副)连接而成的平面机构,因此又被称为平面低副机构。其特点是结构简单,生产成本低[1],可以实现许多不同的运动要求和轨迹。由于低副是面与面的相互接触,其易于制造、承载能力较高,平面连杆机构在各种不同机器设备中应用广泛[2]。
平面连杆机构在各种机械系统中起着十分重要的作用,随着当今社会机械高速化、自动化的快速发展,它在各个工程领域越来越不可或缺。也正因为它自身的众多特点和特性,目前在机械中应用也最为广泛,不仅仅在许多传统的工农业生产制造机械中应用十分普遍,并且还广泛存在于海洋探测、卫星探测、军事装备以及航天航空等现代的高新前端科技领域。比如:智能扫地机、人体假肢[3,4]、火星探测仪、侦查机械狗、仿生海豚、五折伞的伸展支架、感应机械手、康复机器人[5]、射电望远镜反射面支架、航母弹射器及空间站的太阳能充电板的延展机构等等都是平面连杆机构在现代机械发展中所作的巨大贡献。
平面连杆机构应用范围之广以及学者们对其保持着长期的研究兴趣和它自身一系列独特的优点是分不开的。主要表现在以下几个方面:(1)平面连杆机构的结构型式多样,由改变构件的尺寸则可产生形式繁多的连杆曲线,其易变的特性带给学者们无限的想象力和创造力,通过对构件和构件、构件和运动副的各种不同的匹配,更是可以改变机构的工作性能和运动要求;(2)对于平面连杆机构,在不需要改变原动件的情况下,从动件就能够得到许多不同运动轨迹的输出,这使得机构运动方式的选择性十分丰富,从而可以满足很多不同的机械功能要求; (3)因为平面连杆机构中构件间的运动副元素都是面接触,所以承载力比较强,以致于可以满足大多数的重载荷运动要求,其便于润滑的特点以及在机构运动时构件间接触面所受的相对压力比较小,也是使得磨损比高副机构要小很多;(4)平面连杆机构的运动形式和运动大小可调性较好,通过对其构件结构参数以及控制运动的参数进行调整,工程技术人员可轻易地提高机构的适应性与柔性,而且对于机构自由度的设置也是十分灵活。(5)由于低副机构的各个构件之间都是靠它们自身的几何锁合来实现连接,所以平面连杆机构均不需通过其他的锁合装置进行构件之间的连接。(6)只要加长平面连杆机构的构件杆长,就可以扩大机构运动的行程,从而传递较远距离的动作规律。在实际工程机械中,对于大多数的生产工艺的运动要求,平面连杆机构都可以满足,并且它简单的结构型式、低廉的成本、易于加工制造、精度有保障、以及维修、安装起来相对方便等优点,使得平面连杆机构的尺度综合问题一直以来为国内外广大的机构学专家所关注和研究[6]。
同时,平面连杆机构不可避免地也有着些许缺点以及需要加强了解并解决的运动学问题:(1)一般情况下,平面连杆机构不易精确地实现给定的运动要求,且设计过程较为复杂;(2)平面连杆机构各个构件之间低副的几何锁合总有着空隙,随着需要满足的运动要求越来越多、越来越复杂,所需的构件以及运动副数就会大大增多,这个结果就会导致平面连杆机构的结构型式变得非常复杂,以至于机构更容易发生自锁的情况,并且机构不同的运动规律对其加工制造以及安装所造成的误差的敏感性会增加[7],不仅如此,因为各种无法确定的内外部因素的干扰,经常会使得运动机构中构件发生弹性形变以及运动副之间动载荷的增加;(3)平面连杆机构中做复杂的往复运动时,构件的质心大多是作变速运动,所以通常存在某些运动突然出现变化的现象,剧烈的变化所产生的惯性力不易平衡和彻底消除,从而引起持续地振动,冲击和噪音等,导致生产机械工作的性能和效率降低,故连杆机构不易于传递运动速度较快的运动;(4)因为连杆机构自身的运动特性,其运动的传递必须通过中间的每个构件,所以导致传递运动的路线非常长,这就使得机构运动时的累积误差大大增加,机构传递的效率以及工作性能变得低下。对以上问题的解决将成为以后连杆机构学者们研究的方向和创新点。平面连杆机构尺度综合的常用方法有图谱法、图解法和解析法(优化法)[8]。
图谱法是采用所编连杆曲线的图谱来对平面连杆机构进行设计[9],利用“期望轨迹→匹配轨迹→机构”的思想方法[10],也就是首先将所需匹配轨迹从预前所建的轨迹图谱数据库里面搜索出来,再通过提取相对应的构件的尺寸和机构的类型,若是出现了相似的方案,则可以根据“轨迹偏差极小化”的求解思想,就只针对轨迹的偏差最小的那个进行选取。因为同一个类型的机构尺寸可以千变万化,能够产生无数多的运动轨迹,因此想要预先建立涵盖所有运动轨迹情况的曲线图谱是一件相当艰巨而繁杂的工作,而且构件的运动轨迹和机构的尺寸之间存在的关系也没有办法得到,并且它求解精度低、图谱数据库建立繁杂、耗时耗力等缺点也不可忽视。
图解法是建立在运动几何学以及机构运动基础上,依据机构运动时的几何特性[11],应用机构学理论进行作图的尺度综合方法,再根据所给的运动要求来作出连杆机构的运动简图,并且从连杆机构的运动简图上得出机构的具体尺寸参数,以进行连杆机构的尺度综合。利用图解法作图,直观、形象、简单易行,几何意义和基础概念清晰、明确,而且方便在作图的过程中及时发现问题,既可以满足普通机械工程的需求,也可以用来对比较复杂的连杆机构进行尺度综合。不过作图的过程往往比较繁琐,误差不易于控制,所得到机构的构件尺度精度不高,不但耗费时间和精力,还不易于将机构的综合问题与分析问题相联系,从而来选取最好的尺度综合方案,若是某些机构对于精度的要求较高,则很难保证精度达到给定的要求。
解析法是基于函数逼近思想,根据给定的运动要求,列出函数关系式,解大量的非线性代数方程组以算出各构件的尺度参数[12],通过解析法对运动机构进行尺度综合,不仅能够得到较高精度的解,还能够估计或是计算出结果的误差大小。采用解析法综合平面六连杆机构尺度,又有许多不同的优化方法,优化方法的基本思路是寻求一组设计变量,满足约束条件,使得目标函数达到极小值,它是建立在运动分析的基础之上的数学模型方法,采用这些算法进行尺度综合时,不仅分析过程、算法原理复杂,而且初始值的选取对最终优化结果有较大影响,如果初始值选择不合适则不易收敛,这对工程设计人员的知识能力提出了更高要求,并且优化方法通常只可以求出局部的解,因为优化中解的数目很少,不便于对问题的定性分析,也不便进行方案的优选。
平面六连杆停歇机构运动装置设计:
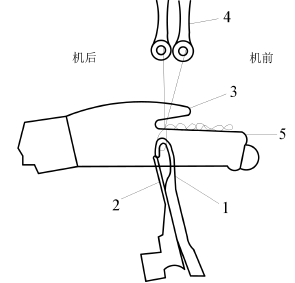
少梳栉经编机成圈机件关系示图
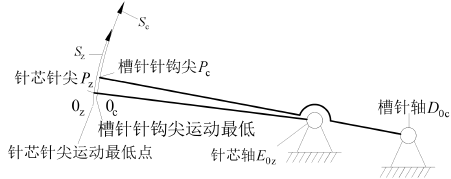
槽针和针芯运动坐标系
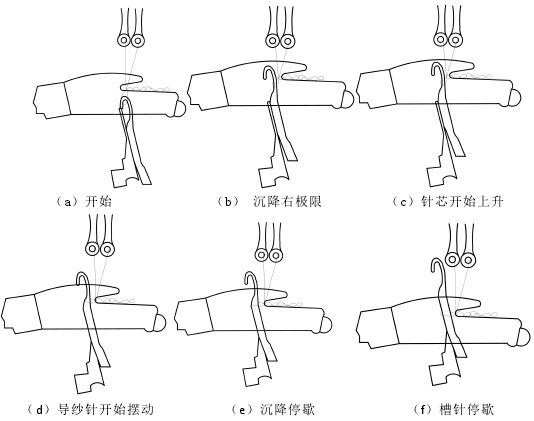
少梳栉经编机成圈过程
目 录
第一章 绪论
1.1 研究背景和意义
1.1.1 概念及应用
1.1.2 连杆机构的优缺点
1.1.3 连杆机构的尺度综合方法
1.1.4 平面连杆停歇机构
1.2 国内外研究状况和发展趋势
1.2.1 连杆停歇机构的研究现状
1.2.2 连杆停歇机构发展趋势
1.3 本课题的主要研究内容
第二章 平面连杆停歇机构的类型及停歇原理
2.1 停歇的概念
2.2 平面六连杆机构的分类
2.3 平面六连杆机构的传动特点及应用
2.4 WATTⅡ型平面六连杆机构的停歇原理
2.5 本章小结
第三章 WATT 型六连杆机构的尺度综合
3.1 图解法
3.2 解析法
3.2.1 外死点-外死点位置
3.2.2 内死点-外死点位置
3.2.3 外死点-内死点位置
3.2.4 内死点-内死点位置
3.3 本章小结
第四章 在少梳栉经编机中的应用
4.1 成圈工艺过程分析
4.2 成圈机件运动要求分析
4.2.1 槽针运动要求
4.2.2 针芯运动要求
4.2.3 沉降运动要求
4.2.4 梳栉运动要求
4.3 机构综合
4.4 结构设计
4.5 本章小结
第五章 总结与展望
5.1 总结
5.2 展望
参考文献
攻读学位期间研究成果
致谢
(如您需要查看本篇毕业设计全文,请您联系客服索取)