24小时论文定制热线
24小时论文定制热线
摘要
随着科技的发展,工业自动化技术水平得到了快速提升。石蜡作为重要的工业生产材料之一,在失蜡法铸造中得到了广泛的应用。某铸造厂为了提高蜡模质量,使用五轴雕刻机直接对蜡模毛坯件进行加工,替代了手工硅胶制作蜡模的方法,提高了产品的精度和成品率。由于空心石蜡件在常温状态下进行搬运和装卡时易于破碎变形,大多采用人工完成上下料工作。现针对人工上下料生产效率低、成本高等问题,提出了研制一种能够完成空心石蜡件自动上下料的机械手。因此,在综合应用机械设计和自动控制等知识的基础上,设计抓取空心石蜡件的机械手,要求所设计的机械手既能稳定抓取又要保证石蜡件不受损伤。该研究对失蜡铸造行业提高生产效率,降低能耗和物耗具有重要实用价值。本文以空心石蜡件上下料工作为研究对象主要开展以下几方面的研究:
(1)测定了不同厚度和直径空心石蜡件的物理特性,为后续末端执行器的设计做好理论依据。为了减小夹取过程中的刚性接触损伤,测定了石蜡件与四种弹性材料间的摩擦系数,选取了合适的夹取接触面材料。
(2)基于石蜡件的物理特性,设计了具有包络抓取和压力反馈的随动三指夹取机构,阐述了其工作原理与工作过程,完成了主要部件的理论分析与结构设计。并基于生产工艺需求,设计了桁架式输送机构,根据生产节拍,确定了机械手的移动速度。
(3)建立了夹取机构运动学方程,基于 ADAMS 仿真软件,以具有代表性的椎体为夹取目标物,对末端执行器进行动力学仿真。结果表明,夹取机构可以在设定夹取力下进行有效抓取。使用 ANSYS Workbench 有限元分析软件进行了动静态分析,得出关键部件的应变图、等效应力图、模态振型以及谐响应曲线,检验了输送机构和夹取机构设计方案的可行性。
(4)设计了以 PLC 和单片机的组合控制系统,并开发了易于学习和操作的人机交互界面,实现了对输送机构和夹取机构的控制。利用 RS485 通信技术,建立了控制器之间的连接,完成了机械手控制系统的设计与制作。
(5)按照上述研究方法,制作了上下料机械手样机,经过实际应用,达到了空心石蜡件的自动抓取、输送和精确定位的要求,完成了空心石蜡件自动上下料工作。
关键词:桁架机械手;末端执行器; ADAMS 仿真;ANSYS Workbench 仿真;PLC

Abstract
With the development of science and technology, the level of industrial automation technology has been rapidly improved. Wax, as one of the important industrial production materials, has been widely used in lost wax casting. In order to improve the quality of wax pattern, a foundry used five-axis engraving machine to process wax pattern blanks directly instead of manual silica gel to make wax pattern, which improved the accuracy and yield of the product. Because the hollow wax parts are easy to be broken and deformed when they are transported and loaded at room temperature, most of them are manually loaded and unloaded. Aiming at the problems of low production efficiency and high cost of manual feeding and unloading, a kind of mechanical hand which can complete automatic feeding and unloading of hollow wax parts is proposed. Therefore, on the basis of comprehensive application of mechanical design and automatic control knowledge, the design of a manipulator to grasp hollow wax parts requires that the designed manipulator not only grasp stably, but also ensure that wax parts are not damaged. The research has important practical value for lost wax casting industry to improve production efficiency, reduce energy consumption and material consumption. In this paper, the work of loading and unloading hollow wax parts as the research object is mainly carried out in the following aspects:
(1) The physical characteristics of hollow wax parts with different thickness and diameter were measured, which provided a theoretical basis for the design of the subsequent end-effector. In order to reduce the rigid contact damage during the clamping process, the friction coefficient between wax parts and four kinds of elastic materials was measured, and the suitable clamping contact material was selected.
(2) Based on the physical characteristics of wax parts, a follow-up three-finger clamping mechanism with envelope grabbing and pressure feedback is designed. Its working principle and process are described, and the theoretical analysis and structural design of the main components are completed. Based on the production process requirements, gantry conveying mechanism was designed, and the moving speed of the manipulator was determined according to the production rhythm.
(3) The kinematics equation of the clamping mechanism is established. Based on ADAMS simulation software, the dynamic simulation of the end effector is carried out with the representative vertebral body as the clamping object. The results show that the clamping mechanism can effectively grasp under the given clamping force. Using ANSYS Workbench finite element analysis software, the dynamic and static analysis is carried out. The strain diagram, equivalent stress diagram, modal mode shape and harmonic response curve of key components are obtained, and the feasibility of the design scheme of conveying mechanism and clamping mechanism is verified.
(4) A combined control system based on PLC and microcontroller is designed, and a man-machine interface which is easy to learn and operate is developed to realize the control of conveying mechanism and clamping mechanism. Using RS485 communication technology, the connection between controllers is established, and the design and manufacture of manipulator control system are completed.
(5) According to the above research methods, a prototype of loading and unloading manipulator is manufactured. After practical application, the requirements of automatic grasping, conveying and precise positioning of hollow wax parts are met, and the automatic loading and unloading of hollow wax parts is completed.
Key words: Gantry robot; End-effector; ADAMS simulation; ANSYS Workbenchsimulation; PLC
目 录
1 绪论
1.1 引言
"中国制造 2025"是我国根据国际产业转型趋势,为全面提升我国制造业质量和水平而做出的重大战略部署。工业机器人既是先进制造业的关键支撑装备,也是改善人类生活方式的重要切入点,其研发和产业化应用是衡量一个国家科技创新、高端制造发展水平的重要标志[1].
在我国,目前以人工组成的生产线在工业生产中仍然占有很大的比例。随着我国人口红利逐步消失,制造业中自动化程度较低的企业用工成本逐渐加大。与此同时,"中国制造 2025"的提出,标志着我国将从制造业大国转型升级为制造业强国,这种由人工组成生产线的生产方式已经不能够满足竞争日益激烈的制造业,其弊病逐渐显露出来。主要表现在生产效率低、产品质量不稳定、劳动力供应短缺以及安全事故等。落后的人工操作也在企业管理上增加了难度,加大了生产企业的发展阻力。激烈的市场竞争,对企业的自动化程度提出了越来越高的要求。机械手经过半个多世纪的发展,在工业领域已然成为一种科技含量高的自动化生产设备,它能够按照预定的程序模仿人手和臂的一些动作功能,工业机械手的应用极高的提升了生产效率、大大地减轻了劳动强度、提高了产品精度、减少了在生产环节中人工操作的危险性。
1.2 课题研究背景及意义
失蜡法铸造技术已有五千余年的历史,目前采用的方法是由硅胶阴模注蜡后得到蜡模,蜡模需要有一定操作经验的技术人员才能制作,蜡模存在厚薄不均匀、气泡、部分或整体结构变形、披缝、小孔不通、冷隔等问题。这些蜡模质量问题都需要人工进行二次加工,增加人工成本和降低了生产效率的同时,修整后的蜡模质量也参差不齐。所以制作蜡模的好坏直接影响着铸造产品的质量,失蜡铸造生产中蜡模的制作是极其重要的工序,是获得优质铸件的首要条件[2].然而,由于忽视该工序,不合格的蜡模流入制壳甚至铸造过程;从而造成了无法修复的废品。因此,如何使生产出合格的蜡模是失蜡铸造工作者的主要任务之一。在安全方面,制作蜡模的过程中会直接接触到高温液体的石蜡,操作不当可能会发生安全事故。
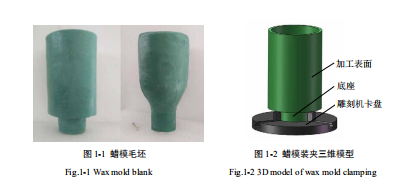
铸造工件质量要求的提高,也就是对铸造过程中重要的影响因素蜡模的质量提出了更高的要求。针对以上手工制作蜡模出现的问题,主要以生产空心石蜡件为主的某铸造厂,为了提高蜡模的质量和生产效率、降低人工成本、改变传统蜡模制造方法,改用加工精度更高的五轴雕刻机对石蜡毛坯件直接雕刻加工,从而制得优质蜡模。空心石蜡毛坯件的高为 100~150mm、直径为 50~100mm、厚度为 2~5mm,具有圆柱和圆锥两种类型,如图 1-1 所示。由于空心石蜡件易碎的特性,雕刻机卡具不宜直接夹紧薄壁处,石蜡毛坯件在五轴雕刻机上的装夹部位为石蜡毛坯件的实心底座,装夹三维模型如图1-2所示。由于空心石蜡件在常温状态下进行搬运和装卡时易于破碎变形,大多采用人工完成上下料工作,而为了能够提高其生产自动化程度,降低人工成本,减少工人在危害环境中工作的情况。现在有必要设计一种能够执行自动装载和卸载并满足生产过程的搬运机械手,由于石蜡在常温状态下其物理性质呈现出脆性,延伸性较差,抗压强度较低,所以就要求所设计的机械手具有稳定的抓取力,并且可根据夹取需要来调节夹取力大小,抓取过程中不能损伤工件。
1.3 工业机器人类型
1.3.1 直角坐标式机器人
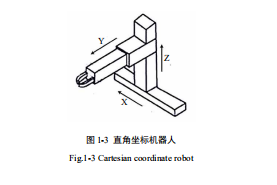
这种机器人由两个或三个轴线互相垂直的移动关节构成,其结构如图 1-3 所示,也就是工业生产中最为常用的桁架机器人和龙门式机器人[3].这类直角坐标机器人的各个轴运动单元是沿着直角坐标 X、Y、Z 方向布置,各轴的移动是按照设定的程序逻辑协调控制。整体结构相对于其他形式的机器人较为简单,易操作,维护费用较低等优点,并且其具有较高的传动效率。现阶段,对于桁架机器人的设计并没有统一的标准,机器人的结构设计一般情况都是根据不同生产要求和应用环境来制定的,下面将介绍应用较为广泛的二自由度和三自由度桁架机器人。
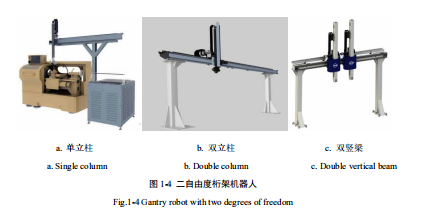
根据桁架的主要结构,二自由度桁架机器人分为多种形式。其中包括由一根立柱作为支撑的桁架结构,主要应用于节奏快,载重较轻的场合,如图 1-4a 所示。对于载重较大或者行程较长的场合,这就要求桁架机器人具有较高的强度,设计成具有两个立柱的结构,如图 1-4b 所示。对于只有一个竖直轴无法完成工作,需要协同作业的场合,可以在竖直方向设计成两个传送轴的形式,如图 1-4c 所示。二自由度桁架机器人具有占地面积小,结构简单等优点。因其只有两个方向的自由度,所以只能够在一个平面内运动,应用范围受到了限制。
三自由度桁架机器人,增加了一个方向的自由度,使机器人能够在空间能进行传送,使其较二自由度的桁架机器人扩大了使用范围,其结构有两种形式,如图 1-5 所示。图 1-5a 中桁架机器人具有占地面积小的特点,但因其 Y 轴方向属于悬臂结构,为了防止 Y 轴变形下沉,所以该轴的行程和负载受到了限制。图 1-5b 中龙门式桁架机器人占地面积大,但其具有行程大以及强度高等优点。

1.3.2 圆柱坐标式机器人
在手臂长度一定时,这种机器人的操作空间形成一个圆柱面,如图 1-6 所示[4].
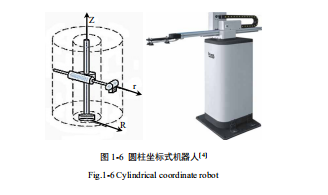
其通过手臂伸缩和通过滚珠丝杠上下旋转移动来进行操作作业。这种机器人操作空间比较直观,但是手臂在伸缩过程中易发生碰撞,并且其移动副不便于维护[5].
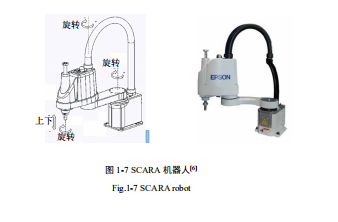
1.3.3 SCARA 机器人
SCARA 机器人其实是一种特殊类型的圆柱坐标工业机器人。该机器人是由旋转关节和一个移动关节构成,并且 3 个旋转轴线相互平行,如图 1-7 所示[6].SCARA机器人在平面内的定位和定向功能是通过三个旋转关节实现的,垂直于平面的定位是通过移动关节完成操作运动。该形式的机器人重量轻、响应快,其第一个轴和第二个轴具有旋转特性,第三和第四个轴可根据工作需要制造成多种不同的形态,并且一个具有旋转、另一个具有线性运动的特性。由于其具有特定的形状,决定了其工作范围类似于一个扇形区域,特别适用于在平面上进行定位,在垂直平面进行装配的操作作业。
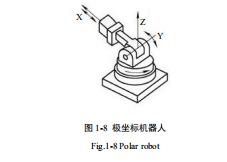
1.3.4 极坐标机器人
极坐标机器人也称球面坐标机器人,如图 1-8 所示。这种机器人的腕部参考点通过旋转和移动形成的轨迹空间为球面的一部分,具有工作空间大、占地面积小、使用范围较大、较灵活的安装使用方式以及准确的定位精度。但是其缺点在于:躲避障碍的能力差,其移动关节难于维护并且长时间工作的情况下存在稳定性问题[7].
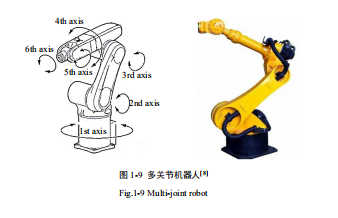
1.3.5 多关节机器人
多关节式机器人的机构如图 1-9 所示,它是以其各相邻运动部件之间的相对角位移作为坐标系[8-9].该机械臂可以达到球形体积内绝大部分位置,两个手臂的长度比例决定了其所能达到区域的形状。多关节型机器人与人臂的构造最为接近,它主要由多个回转或旋转关节组成,其中大多数采用电机驱动机构完成运动,关节的连接方式不同可以完成各种复杂的操作。多关节机器人具有占地面积小、动作范围大、空间运动快速灵活等特点。适于在狭小空间内作业,操作空间极大、躲避障碍的能力最强、可应用的场合最多,是目前应用最多的工业机器人结构形式。其缺点在于:由于可以进行很多复杂操作,相对应的计算控制系统也很复杂,单台机器人的成本也较高.
1.4 末端执行器研究现状
对于易碎件的抓取,工业上用于抓取金属类工件的末端执行器并不能满足要求,故对于具有柔性抓取性能的机械手进行了文献查阅与分析。柔性夹取机械手的设计思想主要是应用欠驱动,即机构内独立的自由度的数量小于系统输入驱动源个数,减少驱动可以使机构控制系统简化,在一定程度上减轻了整机的质量。与此同时,多自由度机构能够适应不同形态的夹取物的外形,具有很强的自适应性,能够满足柔性和包络抓取条件的要求。
1.4.1 腱传动欠驱动机械手
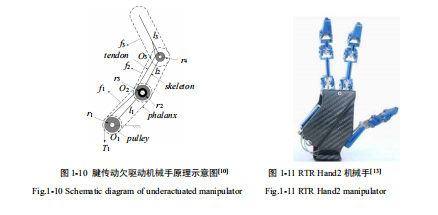
通过绳索和滑轮间配合来传递动动力的欠驱动机械手称为腱传动机械手,其原理如图 1-10 所示[10-11].滑轮装配在每一个手指旋转关节处,并利用绳索绕过滑轮将指节串联连接。绳索拉动手指旋转,当指节接触到物体时,该指节不再运动,绳索将会随着滑轮空转,其它指节继续向目标物靠近,最终完成目标物的抓握[12].
意大利 ARTS/Mitech Labs 试验室的科学家通过对 RTR Hand1 机械手的的改进,利用欠驱动思想研制了 RTR Hand2 型欠驱动机械手,如图 1-11 所示[13].仿照人手的结构设计,具有三根手指的 RTR Hand2 型机械手内部动力的传递是利用腱和齿轮机构来完成的。三根手指中的每一根手指都是三自由度,将其中一个具有两个关节的手指作为拇指,在另一个自由度下,拇指可以完成左右摆动动作,其余两根手指都具有三个关节。通过三指间的多个压缩弹簧滑块实现驱动电机输入动力的转换,将驱动力输出至不同手指,将另一个电机安装于拇指的根部,即可驱动拇指的左右摆动。
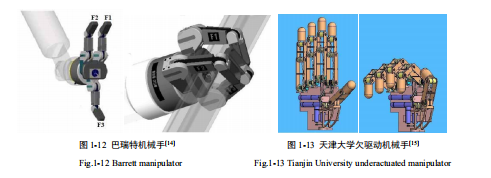
BH8-601 型欠驱动机械手于 2002 年由英国的巴瑞特公司研制成功,如图 1-12 所 示[14].该机械手是由 3 根手指构成的欠驱动手爪,每根手指具有两个指节,并由 1根绳索连接,内部传动控制采用了伺服驱动系统。其中传动部件包括齿轮、涡轮、蜗杆、绳索以及滑轮等。该机械手的主要优势是手指在狭小的空间内也能正常工作,具有较好的抓握能力。
天津大学的向红标等人利用交叉腱传动研制了一款仿人手型欠驱动机械手,内部结构驱动原理采用齿轮差动方式,如图 1-13 所示[15].本机械手使用了四个电机作为输入驱动源,共有 15 个自由度,仿人手设计使其可以像人手一样伸展、抓握,并可以通过调节抓取力度来实现不同大小物体的抓取动作。
1.4.2 连杆传动欠驱动机械手
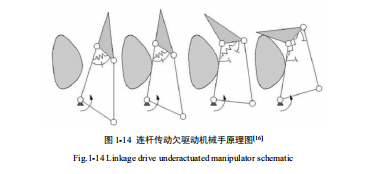
连杆驱动欠驱动机械手采用四连杆传动原理将驱动力施加到连杆的一端,可以驱动整个手指运动,工作原理示意图如图 1-14 所示[16].
采用连杆传动欠驱动思想,加拿大 Laval 大学的 Gosselin 研究组开发了 SARAH三指欠驱动机械手,如图 1-15[17].所示该机械手每根手指具有 3 个指节,共 10 个自由度,手指关节处安装有扭簧,起到储能和限制其多余自由度的作用。该机械手共使用 2 个电机驱动动力输入,通过行星轮系组成差动机构和手指采用连杆结构的联动形式在三指间进行动力的传递,凭借巧妙的设计和突出的工作能力,该机械手曾在国际空间站上得到应用。可抓握多种形状的物体,如多面体、球体、圆柱体等。
意大利卡西诺大学与北京航空航天大学合作研制出了 LARM 欠驱动机械手,如图 1-16 所示[18].该机械手为仿人手欠驱动机械手,通过四连杆机构的交叉方式将每根手指的自由度减小到一,将扭簧装配手指关节处,使手爪抓在握过程具有良好的柔软性和物体形状适应性。

法国 LIRMM 公司开发了一种两指欠驱动手爪,如图 1-17 所示[19].采用气缸作为驱动装置,其主要特点是当指节受到物体反作用力时,存储在被动缸中的压缩气体能够阻止指节沿相反方向旋转。又能保持手指对物体的抓握力不至于过大,抓取不同形状物体具有良好的适应能力。

中国科学院开发了一款使用连杆传动的仿人手欠驱动机械手,每根手指采用独立驱动源,因此,可以精准的控制其运动,精度较高。手指可以实现包络抓握和指尖捏取,如图 1-18 所示[20].
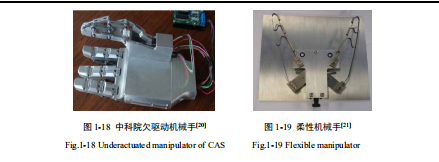
德尔福特工业大学使用记忆金属研制出一种柔性连杆欠驱动机械手,如图 1-19所示[21].金属片在根部的驱动下能够产生弹性变形,所以该机械手可以适应物体形状的种类较多。其缺点是刚性差,因此容易产生平面外的变形。
1.5 机械手设计要求
针对夹取不同工件的应用场合,对机械手末端夹取机构有不同的要求,特别是针对本文所研究的空心石蜡件,其相对刚度低,脆性大的特性。
夹取机构:蜡模夹取过程中既要能够稳定抓取又不对其产生损伤,保证在移动过程中的平稳,这就对末端执行机构提出了较高的特殊性能要求。需要在研究蜡模物理性能的基础上,设计一款结构简单、包络性好、夹取力反馈和夹取速度可控的末端执行器,且要求夹取力的精度达到±0.2N.
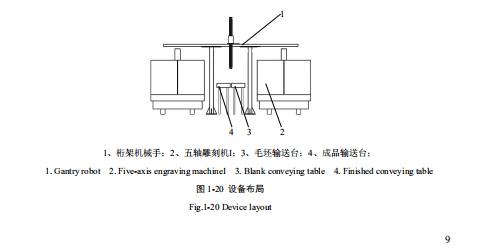
传送机构:根据生产工艺要求,本课题所要求的机械手需要配合两台雕刻机工作,即需要机械手在两台雕刻机之间循环执行上下料工作,无论采用上述何种形式的机械手都需要在两个雕刻机间铺设移动轨道,结合生产要求并考虑到生产场地最大利用率,设计将两雕刻机间轨道布置于雕刻机上方,这样减少了占地面积,也充分利用了雕刻机上方闲置空间。考虑到上下料过程中,机械手所夹取工件并无复杂的放置动作,因此,结合经济性考虑,所设计的机械手结构应尽可能简单。基于以上分析,本研究机械手形式最终选择了二自由度桁架式机械手。结合生产工艺,设计了如图 1-20 所示的机械手空间布局。
1.6 主要内容和研究方法
本论文主要针对易碎空心石蜡件上下料机械手进行了整体的设计,包括桁架输送机构和机械手夹取机构。对关键部件进行了动力学分析和结构动静态有限元分析,设计了以 PLC 和 STM32 单片机组合的控制方案,并开发触摸屏人机交互界面,完成了该机械手控制系统的设计。
(1)通过试验,充分掌握石蜡薄壁件的物理特性、力学特性等参数,进而为末端夹取机构的设计提供理论依据。
(2)通过分析和研究机械手领域的研究成果,结合空心石蜡件物理特性,进行机械手夹取方案设计。
(3)考虑加工空间最大利用率,并结合加工工艺,采用二自由度的桁架机械手方式,通过理论计算及仿真分析设计桁架机械手的两个传动单元及立柱。根据生产要求确定两个输送单元的运动参数,并选择合适的驱动电机。
(4)基于传动机构和夹取机构的运动特性研究,通过仿真分析,对整机的重要部件进行动力学以及结构动静态有限元分析,以验证机构设计的合理性。
(5)综合利用自动控制、传感器、通讯以及人机交互技术,设计整机的控制系统。
(6)联机调试,对桁架机械手的两个移动方向和夹取机构进行调试。两个移动轴满足负载和移动速度要求的同时,要求系统要有较高的稳定性。对夹取机构进行夹取力的测试,进一步完善桁架机械手。
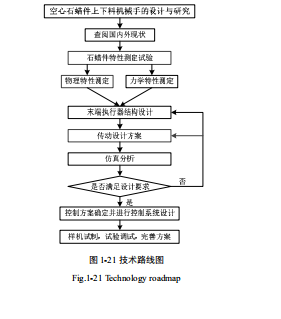
本研究的主要技术路线如图 1-21 所示。
2 末端执行器设计
2.1 蜡模毛坯物理性能分析
2.1.1 径向压溃力测定
2.1.2 摩擦系数测定
2.2 手爪结构设计
2.3 手爪结构分析
2.3.1 机架与传动构件
2.3.2 手指单元
2.4 手爪结构参数设计
2.5 末端执行器整机及工作原理
2.6 本章小结
3 传送机构设计
3.1 桁架结构设计
3.1.1 自由度和桁架结构参数设计
3.1.2 最大速度和负载能力
3.1.3 定位精度
3.1.4 传动方式分析与优选
3.1.5 运动部件设计
3.2 驱动电机选型
3.2.1 驱动电机性能分析
3.2.2 驱动电机参数计算
3.3 线性滑轨寿命校核
3.4 立柱与调平装置设计
3.5 本章小结
4 机械手仿真分析
4.1 手爪运动学方程建立
4.2 手爪静力学分析
4.3 手爪动力学仿真
4.4 机械手有限元分析
4.4.1 Workbench 仿真分析流程
4.4.2 静态结构分析
4.4.3 动态特性分析
4.5 本章小结
5 控制系统设计
5.1 控制器选型
5.2 传动系统控制设计
5.2.1 PLC 的选型及 I/O 分配
5.2.2 人机交互界面选型
5.2.3 伺服电机驱动系统设置
5.2.4 限位传感器选型
5.2.5 末端执行器旋转方案设计
5.3 末端执行器控制设计
5.3.1 单片机选型
5.3.2 压力传感器选型
5.3.3 步进电机与驱动器选型
5.3.4 LCD 触摸屏界面程序设计
5.4 PLC 与单片机间通讯的建立
5.5 传送执行规划
5.5.1 上下料轨迹规划
5.5.2 人机界面设计
5.6 系统控制程序设计
5.6.1 PLC 主程序
5.6.2 定义 PLC 与单片机通讯协议
5.6.3 示教程序
5.6.4 循环执行程序
5.6.5 回原点程序
5.7 本章小结
6 样机制作与试验
6.1 样机制作
6.2 轨迹点示教试验
6.3 轨迹执行与抓取动作试验
6.4 本章小结
7 结论与展望
7.1 结论
随着自动化程度的提高,上下料机械手在近年智能制造领域得到了广泛的研究和应用。上下料机械手的主要工作任务是给特定的外围自动化设备上下料,替代或减少人工劳动。对于不同的生产要求,对机械手需求也不尽相同。因此,在上下料机械手的设计过程中,首先对夹取物的特性进行研究,再结合外围自动化设备,从机械设计和自动控制两个方面对上下料机械手进行整体设计和制作。
因此,从上下料机械手的机械结构设计和控制系统设计两个方面来讲,为了完成空心石蜡件的上下料工作,总结本论文的研究成果如下:
(1)针对空心石蜡件的物理特性,进行了相关的试验。通过压溃力试验,得出了直径为 50~100mm、厚度为 2~5mm 空心石蜡件的压溃力大小为 8.02~54.36N,为夹取机构的设计提供了理论依据。通过对不同弹性材料与石蜡件间的摩擦系数试验,选出静摩擦系数为 0.54、动摩擦系数为 0.50 的硅胶作为接触面材料。
(2)设计了一种结构简单且具有夹取力反馈的末端执行器,该末端执行器由两个手爪组成,可分别设置不同的夹取力,以满足上下料两个阶段不同夹取力需求。夹取力精度为±0.1N,达到了夹取易碎空心石蜡件的技术要求。
(3)分析现有的上下料机械手形式,结合生产工艺要求,对设备进行合理布局,设计了桁架结构输送方案。采用了齿轮齿条为传动方式,设计了横梁单元、滑板以及竖梁单元。根据机械手的负载、最大速度和最大加速度对驱动电机进行了相应的计算与选型。
(4)应用 ADAMS 仿真软件对末端执行器进行了动力学仿真,得出了在工作中各关键部件的受力曲线、位移曲线以及速度曲线。末端执行器的运动位移曲线平稳,手指运行轨迹说明末端执行器能够实现对物体的包络抓取。通过 ANSYS Workbench有限元仿真软件对末端执行器和桁架结构进行了结构动静态有限元分析,由静力学分析结果可知各单元强度达到设计要求。通过模态分析,得出了末端执行器和桁架结构的前六阶模态和振型图,并对桁架结构进行了谐响应分析,得出机械手在外载荷频率为 10.5Hz、18Hz 和 27Hz 左右时,机械手振动幅度较大。因而机械手应避免工作在这些频率附近,结果分析表明外部激励不会使本机械手产生共振,也为桁架机械手的结构优化设计和改型奠定了重要的理论基础。
(5)设计了以 PLC 和单片机组合的控制系统,开发了易于学习和操作的人机交互界面。选择了 KNX-2K 压力传感器和 A/D 信号转换模块,实现了单片机对夹取力的采集。编写相应的通讯协议,通过 TTL 与 RS485 信号互转模块,建立了 PLC 与单片机间的通讯,实现了控制器间控制指令以及数据的传输,完成了整机控制系统的设计。根据设备布局,完成了执行轨迹的规划。
(6)根据设计方案制作了机械手样机,通过示教工作,对机械手的工作轨迹进行了规划。通过对空心蜡模上下料试验,对机械结构和控制方案进行了验证,通过试验验证机械手运行平稳,机械手满足了上下料工作任务的需求,证明了所设计的夹取机构、传动机构以及控制系统的方案是正确的。
7.2 展望
针对空心石蜡件的上下料过程,本文从机械设计和控制设计两个方面对机械手进行了深入的研究,但是仍有些方面有待改进和完善,主要有:(1)在结构设计方面,手爪的部分构件尺寸只是初步选定,并没有对各构件的尺寸进行优化,手指构型略大,后期可对该方面进行研究,使手爪的结构更加紧凑。
(2)在功能方面,增加视觉检测蜡模成品质量功能,在机械手下料时,将合格品和不合格品进行分离,进一步增加机械手的智能化水平。
参考文献
[1] 徐崇温。 中国道路与科技创新战略[J].求索,2016(10):4-12.
[2] 潘玉洪。 熔模铸造蜡模缺陷分析[J].金属加工(热加工),2014(07):25-27.
[3] 程敏。 基于 SYSMAC NJ 控制器的并联机械手控制系统[D]. 青岛:青岛大学, 2014.
[4] 赵武云。 工业机器人技术基础[M]. 西安: 西北工业大学出版社, 2007.
[5] 牟昌进。 5R 关节型上下料机械手的运动学分析及其仿真的研究[D]. 沈阳:沈阳工业大学,2016.
[6] Sanjeewa Gamaralalage,Pagan Jesus,Du?an ?ormaz. Conversion of the SCARA Robot into aHybrid Manufacturing Workstation[J]. Procedia Manufacturing,2018,17.
[7] 李炜。 卫生陶瓷修坯机器人的机构研究[D]. 唐山:华北理工大学, 2016.
[8] 韩瑜, 许燕玲, 花磊, 等。 六轴关节机器人系统结构及其关键技术[J].上海交通大学学报,2016,50(10):1521-1525.
[9] Peng An. Path Optimization Method of Autonomous Intelligent Obstacle Avoidance for Multi-jointSubmarine Robot[J]. Journal of Coastal Research,2018,SI(82)。
[10] Birglen L, Lalibert T, Gosselin C M. Underactuated Robotic Hands[M]. Springer Berlin Heidelberg,2008.
[11] Anonymous. Tendon-Driven Finger, Wrist, and Thumb Actuation System[J]. NASA TechBriefs,2016,40(1)。
[12] 黄勇。 绳轮式欠驱动机械手设计与试验研究[D]. 哈尔滨:哈尔滨工业大学, 2017.
[13] B.Massa, S.Roccella, M.C.Carrozza. Design and Development of an Underactuated ProstheticGrasper[C]// IEEE International Conference on Robotics and Automation, 2002:3374-3379.
[14] Townsend W. The Barrett Hand grasper-programmably flexible part handling and assembly[J].
Industrial Robot, 2000, 27(3):181-188.
[15] 向红标。 新型多指灵巧手的结构设计与性能分析[D]. 天津:天津大学,2007.
[16] 吴楠。 欠驱动索杆桁架式机械手爪设计与试验研究[D]. 哈尔滨:哈尔滨工业大学,2014.
[17] Thierry Laliberte, Birglen L,Gosselin C M. Underactuation in robotic grasping hands[J].MachineIntelligence and Robotic Control,2002,4(3):1-11.
[18] Ceccarelli M, Tavolieri C, Lu Z. Design Considerations for Underactuated Grasp with a one D.O.F.
Anthropomorphic Finger Mechanism[C]// IEEE International Conference on Intelligent Robotsand Systems, 2007:1611-1616.
[19] V. Begoc, S. Krut, E. Dombre. C. Durand and F. Pierrot. Mechanical design of a newpneumatically driven underactuated hand[C]// 2007 IEEE International Conference on Roboticsand Automation, Roma, Italy, 2007: 927-933.
[20] 李涛, 骆敏舟, 时张杰, 等。 欠驱动仿人机器人手爪的精确捏取与包络抓取研究[J]. 机械设计,2009, 26(11):42-45.
[21] P Steutel , GA Kragten . Design of an Underactuated Finger with a Monolithic Structure andLargely Distributed Compliance[C]//Proceedings of the ASME 2010 International DesignEngineering Technical Conferences & Computers and Information in Engineering Conference.Montreal, Quebec, Canada: Delft University of Technology, 2010: 1-9.
[22] 李娇娇。 铸造蜡 3D 打印机的设计与研究[D]. 保定:河北农业大学,2018.
[23] 赖勇。 一种主从式机械手末端的定位精度研究[D]. 上海:东华大学,2017.
[24] 马超, 熊晓航, 王宏祥。 浅谈平面机构传动角教学方法[J]. 辽宁工业大学学报(社会科学版),2015, 17(06):133-135.
[25] 张义万, 石成江, 王殿君, 等。 七自由度机器人误差建模及标定试验研究[J]. 新技术新工艺,2015(10):72-76.
[26] 唐野。 四轴冲压上下料机械手开发研究[D]. 长春:吉林大学,2018.
[27] 亚晓丹。 桁架式机床上下料机器人分析与改进设计[D]. 沈阳:东北大学, 2014.
[28] 熊利荣, 郑伟, 罗舒豪。 基于触觉感知的家禽净膛机械手及其控制系统的设计[J].农业工程学报,2018,34(03):42-48.
[29] 周飞。 M1020 无心外圆磨床自动上料机设计[D]. 西安:西京学院,2016.
[30] 王政杰, 葛正浩, 李森, 等。 高速同步带间歇传送装置的动态性能研究[J].包装工程,2018,39(03):172-177.
[31] 曹忠亮, 孟庆鑫, 郭强, 等。 同步带的动态性能分析[J].机械设计,2017,34(07):78-81.
[32] 杨继珍。 重型数控车床双齿轮齿条传动进给机构的设计与仿真分析[D]. 兰州:兰州理工大学,2017.
[33] 张文强。 轧钢机床传动部分的方案设计原则[J]. 民营科技,2015(01):50.
[34] 宗帅。 高速滚珠丝杆副机械特性分析[D]. 西宁:青海大学,2016.
[35] 武杨滨, 罗丹。 直线电机的特点和应用[J].农家参谋,2019(09):222.
[36] 冯定, 亢博文, 施雷, 等。 大模数重载齿轮齿条接触强度分析[J].石油机械,2018,46(08):14-19.
[37] 夏长高, 魏婕, 周雯雯。 多功能作业机传动齿轮的齿廓修形研究[J].中国农机化学报,2017,38(04):63-68.
[38] 丁锦宏。 冲床送料机械手的设计与应用[J]. 江苏工程职业技术学院学报, 2018, 18(04):1-3.
[39] 魏凌志。 PLC 控制的伺服电机控制系统参数设置与调试[J]. 广东职业技术教育与研究,2017(03):201-206.
[40] 齐诗萌, 闵华松, 黄文晖。 基于步进电机的机器人夹持器控制系统设计[J].仪表技术与传感器,2018(09):61-65.
[41] 罗少斌。 M1083A 普通无心外圆磨床改造创新与研究[D]. 江门:五邑大学, 2014.
[42] 唐明媚。 基于 s7-200 PLC 的伺服电机位置控制[J].北华航天工业学院学报,2018,28(06):5-7+21.
[43] 徐亮。 电动汽车自动车衣结构及控制系统设计[D]. 南京:南京航空航天大学,2016.
[44] 洪家俊。 基于西门子 802C 的 ZJK7532A 数控钻铣床改造[D]. 桂林:广西师范大学, 2016.
[45] 路阳, 林桁。 伺服电机的功能与作用阐析[J].科技创新与应用,2016(09):119.
[46] 王晓瑜 . 基 于 PLC 及反馈电路的步进电机闭环控制系统改造 [J]. 机床与液压,2014,42(16):172-173.
[47] 司鹏辉。 步进电机和交流伺服电机性能综合比较[J].电子测试,2015(13):85-86+47.
[48] 黄丙耀。 定子硅钢片高速冲压机械手控制系统研究[D]. 深圳:深圳大学, 2017.
[49] 姬中晴, 欧屹, 梁医, 等。 滚动直线导轨副可靠性试验及方法研究[J].组合机床与自动化加工技术,2015(09):34-37.
[50] 郭瑞峰, 彭战奎, 张文辉, 等。 化肥码垛机器人的轨迹规划及仿真试验[J].江苏农业科学,2018,46(19):249-252+260.
[51] 李增刚。 ADAMS 入门详解与实例[M]. 北京:国防工业出版社, 2014.
[52] 倪圆志, 张建富, 郁鼎文, 等。 考虑动静态特性的拖板结构优化设计研究[J].制造技术与机床,2017(11):71-78.
[53] 苗登雨。 重载搬运机器人结构设计与动态性能分析优化[D]. 合肥:合肥工业大学, 2014.
[54] 何浩祥, 许洪刚, 许维炳。 悬吊双摆动力特性分析及其在结构减振控制中的应用[J].振动工程学报,2019,32(02):305-313.
[55] 蒋玲。 力学能力的潜在研发与实践应用[J]. 科技资讯, 2015, 13(05):168-169.
[56] 刘凡, 杨光友, 杨康。 农业采摘机器人柔性机械手研究[J]. 中国农机化学报, 2019,40(03):173-178.
[57] 袁小会, 蔡逸飞, 刘桂花,等。 机械手气动程序气控系统干扰信号分析及处理[J]. 机械工程师,2019(03):99-100+102.
[58] 李钦河 , 刘子强 , 刘灿伦 , 等 . 某 80t 汽车起重机转台模态分析 [J]. 建筑机械 ,2014(06):72-75+14.
[59] 宋健鹏。 大垄双行秸秆深埋还田机的设计与参数优化[D]. 沈阳:沈阳农业大学, 2018.
[60] 丛明, 石会立, 宋鸿升, 等。 桁架机械手动态特性的有限元分析[J]. 组合机床与自动化加工技术, 2008(06):19-22.
[61] 王彪。 桁架机器人耦合特性分析与结构优化[D]. 合肥:合肥工业大学, 2017.
[62] 杜雪亮。 基于工业 PC 运动控制的陶瓷制品全自动取放料机械手的研制[D]. 天津:天津工业大学, 2016.
[63] 于复生, 徐升明, 杜桂林, 等。 基于 S7-200PLC 的散热片自动化装配的控制系统设计[J].组合机床与自动化加工技术,2014(11):107-109.
[64] 魏艳红,韩丽洁,许昌。 基于 PLC 的电动缸伺服控制系统设计[J].电气传动,2014,44(10):60-63.
[65] 陶振平。 重组竹家具雕刻工艺研究[D]. 长沙:中南林业科技大学, 2014.
[66] 赵婕。 浅谈触摸屏技术及其应用[J].电子世界,2018(23):127-128.
[67] 李 旦 , 李其亮 . 基于超短激光微加工的数控人机交互界面设计 [J]. 激光杂志 ,2018,39(12):93-97.
[68] 杨庆璐。 烟草夹持式智能打顶机的研制与试验[D]. 泰安:山东农业大学, 2018.
[69] 喻旭凌。 面向教学用柔性自动化检测生产线的控制系统设计与实现[D]. 杭州:浙江工业大学,2016.
致谢
时光荏苒,岁月如梭,不知不觉间硕士毕业论文即将结尾,这也预示着我匆匆的学生时代也要就此画上句号。回首过往,在河北农大这座百年学府中,我有幸结识了机电工程学院那些知识渊博、和蔼可亲、诲人不倦的老师们。三年研究生时光中,跟随着老师们的足迹,使我在学习、工作、生活和思想上都受益匪浅同时也感触颇多。
首先,我要由衷感谢的是河北农业大学机电工程学院机械系孙维连教授,本课题是在导师孙老师的悉心指导下完成的。从课题选择、方案制定及改进设计、样机制造到最终论文的撰写,每一步都离不开孙老师的悉心指导,为此他倾注了大量的心血。
他渊博的专业知识,严谨的治学态度,精益求精的工作作风,以及朴实无华、平易近人的人格魅力对我影响深远,使我受益匪浅。
在课题的研究期间,还得到了王会强老师、孙铂老师、张淼老师、李新领老师、张艺老师、弋景刚老师、王家忠老师、李娜老师等人的帮助支持与指导,在此向他们表示深深的谢意。
本论文的顺利完成,也离不开同学们的关心和帮助,感谢我的师兄周荣青、贾玉挺、马召磊,师姐李娇娇,同届陈亚茹、张志勇、武卫超、陈金明、赵春荣,师弟郝策、王浩伟、柯稳、张桢、刘惠明、赵伟、朱洋洋以及师妹陈晓梅在试验和论文撰写过程中给予的支持和帮助,在此向他们表示深深的感谢!
感谢我的父母及家人,他们一直在背后支持我、鼓励我,他们是我的坚强后盾,给予我最无私的爱和关怀,我要再接再厉不辜负家人对我的美好期望。
最后向在百忙之中抽出时间评阅本论文的各位专家老师表示最诚挚的谢意!
(如您需要查看本篇毕业设计全文,请您联系客服索取)