24小时论文定制热线
24小时论文定制热线
摘 要
随着中国经济的发展,2016 年我国汽车产销量再创新高,居全球第一,其中商用车产出 369.81 万辆,销售 365.13 万辆,相比于 2015 分别增长 8.01%和 5.80%。同时,“十三五”规划中提出的进一步提高城镇化率,将促进城乡客运一体化和对物流用车的强劲需求。可见,未来对于商用车的需求越来越大,但也同时对商用车的驾驶舒适性提出了更高的要求。
商用车区别于乘用车,以载货为主要目的,在驾驶舒适性和转向操纵性上相比于乘用车落后很多,这一缺点在国内的商用车上体现的尤为明显。商用车面临的这些不足,长此以往会给驾驶员带来与职业伤害有关的疾病,欧洲职业安全健康组织 (EU-OSHA)的一项调查显示,在欧洲从事货运行业的人员中,54%的女性和 37%的男性在颈、肩、腰等部位都存在问题。因此,设计一种商用车的转向辅助系统来改善转向操纵性及轻便性十分有必要。本文基于国内外相关技术设计了商用车电液耦合转向系统机械结构,搭建了相应的硬件在环实验台,依托试验台设计了基于理想转向盘力矩的基本转向助力、转向回正与阻尼控制策略,并通过仿真和试验台实验验证了控制策略的有效性。本文研究的主要内容如下几方面:
(1) 设计了商用车转向助力特性曲线。从不同车速的角度出发来分析影响驾驶员理想转向手力矩的因素,分为低速段和中高速段考虑助力特性。低速时以转向盘转角为变量来考虑理想转向力矩特性,中高速段以侧向加速度为变量来考虑理想转向力矩特性。最后,根据理想转向力矩与实际转向手力矩的差值作为转向助力矩设计了助力特性曲线。
(2) 针对转向轻便性与操纵性,设计了商用车的基本助力控制、转向回正与阻尼控制策略。基本助力是依据助力特性曲线的车速感应型控制,根据车速和转向手力矩来确定助力矩。转向回正和阻尼控制是基于方向盘转角的的 PID 控制,回正力矩和阻尼力矩根据车速和转向盘转角偏差的大小确定。
(3) 商用车电液耦合转向系统控制策略软件仿真验证。分别对电液耦合转向系统液压助力系统、电动助力系统、转向机械系统搭建了 AMESim 模型,在 Simulink 中搭建控制策略模型。通过 Simulink、TruckSim 商用软件、AMESim 软件三者联合仿真验证了转向控制策略的有效性。
(4) 硬件在环试验台设计。分析国外相关产品的结构特点,设计适合本试验台的转向柱助力式商用车电液耦合转向系统硬件在环实时仿真平台,根据试验台的总体设计方案进行硬件的设计选型。编写了基于 LabVIEW 的 TruckSim 与 LabVIEWRI 通信、转向阻力加载控制、信号采集及助力电机控制程序,建立 Simulink 实时仿真模型。
(5) 控制策略硬件在环试验台验证。为了验证转向控制策略应用在实物上的有效性,本文依托试验台设计方案,搭建商用车电液耦合转向系统硬件在环试验台。试验表明商用车的转向控制策略能有效的改善商用车的转向轻便性、转向回正性能以及回正超调。
关键词:理想转向力矩,商用车转向助力特性曲线,电液耦合转向系统控制策略,电液耦合转向系统硬件在环试验台
Abstract
With the development of China's economy, China's automobile production and sales in 2016 hit a high record, ranking first in the world, of which commercial vehicles production andsales 3.6881million and3.651 million, anincreaseof8.01%and 5.80%.Atthesame time, the "Thirteen Five" plan proposed to further improve the urbanization rate, will promote the integration of urban and rural passenger transport and the strongdemand for logistics vehicles.
It is clear that the future demand for commercial vehicles is growing, but also put forward higher requirements on the commercial vehicle’s driving comfort.
Commercial vehicles, mostly used to carry cargo, are different from passenger cars and lag a lot compared to the passenger car in the driving comfort and steering maneuverability.This shortcoming in the domestic commercial vehicle is particularly evident.
Facing these shortcomings of commercial vehicles, the long run to the driver will bring about related occupationaldisease.The EuropeanOccupational SafetyandHealthOrganization(EU-OSHA) conducted a study showed that 54% of women in the European transport industry and 37% of men have muscular and skeletal problems. Therefore, it is necessaryto design a steering assist system for commercial vehicles to improve steering maneuverabilityand portability. Based on the relevant technology at domestic and abroad, the mechanical structure of the Electro-hydraulic coupling steering system of commercial vehicle was designed, the corresponding hardware in the loop test rig was built, and the basic steering assist, self-aligning and damping control strategies was designed based on the ideal steering wheel torque which based on the test rig. The correctness of the control strategyis verified bysimulation and bench experiment.
The main contents of this paper are as follows:
(1) Designing the steering assist torque curve of commercial vehicle. Analysising the factors that affect driver's ideal steering hand torque factors at different speed, dividing into low-speed and high-speed section to consider the power characteristics. In the case of low speed,theidealsteeringtorquecharacteristicis consideredasthevariableofthesteeringwheel angle, and in the case of high speed it is considered as the variable of the lateral acceleration. Finally, the steering assist curve torque is designed according to the difference between the ideal steering torque curve and the actual steering hand torque.
(2) Designing the basic power control, self-aligning and damping control strategies of commercial vehicles for steering portability and maneuverability. The basic power control is based on the assisting curve torque which is related to the speed, and determines the assist torque according to the vehicle speed and the steering hand torque. The self-aligning and damping controls are based on the PID control of the steering wheel angle, which determines the self-aligning torque and the damping torque.
(3) Verifying the control strategy of Electro-hydraulic coupling steering system through software simulation. The AMESim model were established for the hydraulic power system, the electric power system and the steering mechanical system of the Electro-hydraulic coupling steering system respectively. The control strategy model were set up in Simulink. Theeffectivenessofthesteeringcontrolstrategyis verifiedbythejoint simulation ofSimulink, TruckSim andAMESim.
(4) Designing hardware in the loop test rig. The structural characteristics of foreign products were analyzed, and the hardware in the loop test rig for the Electro-hydraulic coupling steering system of the steering column assisted commercial vehicle was designed, Also, the hardware was designed and selected according to the overall design of the test rig. The LabVIEW-based control procedures of communication between TruckSim and LabVIEW RI, steering resistance, signal acquisition, power motor was programmed.
(5) Verifying control strategy on the hardware in the loop test rig. In order to verify the effectiveness of the steering control strategy applied in material object, this article build hardware in the loop test rig of Electro-hydraulic coupling steering system for commercial vehicle, relying on the design scheme. Experiments show that the steering control strategy of commercial vehicles can effectively improve the steering portability, self-aligning performance and self-aligning overshoot of commercial vehicles.
Keywords:Ideal Steering Torque, Steering Assist Curve Torque for Commercial Vehicle, Electro-hydraulic Coupling Steering System Control Strategy, Hardware in the Loop Test Rig
转向系统作为汽车的重要部件,能够按照驾驶员的转向意图改变车辆的原先的行驶方向[1]。其设计的好坏与车辆的转向轻便性、操纵稳定性、主动安全性、燃油经济性,以及车辆的机动性能息息相关。商用车由于质心高、整车质量重、高宽比大,相比于乘用车比较难满足转向轻便性以及操纵稳定性的要求。为满足这些要求,商用车的转向助力系统先后经历了液压助力(Hydraulic Power Steering,HPS)、电控液压助力(ElectronicallyControlledHydraulicPowerSteering,ECHPS)、电动助力(ElectricPowerSteering,EPS)三个阶段,商用车的转向技术正朝着更加智能化的方向发展[2][3][4][5]。
但是,这些转向系统还存在很多不足,下文对其讨论如下:
重型车辆的转向阻力大,传统的机械式转向系统在重型商用车上已经不能满足转向轻便性的要求,因此液压助力转向系统在重型商用车上普遍得到应用。这种动力转向器的结构组成包括两部分:机械部分、液压部分。即在传统的机械式循环球转向器的基础上添加了液压助力,主要包括转向油泵、储油罐、液压管路,这种结构改善了商用车传统机械式液压助力的转向沉重的问题。
HPS 满足了转向轻便性的要求,但是同时也产生了 3 点不足:第一,由于系统的高压液压管路以及油泵的存在,高压油液在通过阀芯与阀套之间的的阀孔时,会产生刺耳的噪声;第二,无论是否转向油泵都随发动机而转动,油泵输出的流量随发动机转速的增加而增加,从溢流阀溢出的流量也增加,这部分溢出的流量就是能量损失,能量的损失约占 HPS 总能耗的 46%[6];第三,助力特性不可调,转向助力矩不能随车速而调整。
为解决 HPS 助力不可调的缺点,提高车辆的操纵稳定性,要求车辆根据不同工况自行的调整,即在低速时转向轻便,高速时即满足转向轻便性又能提供足够的“路感”。
丰田于 1973 年第一次采用了电控液压助力转向系统,ZF 公司相继生产的 Servotronic型电控液压转向助力系统也应用在了波兰客车制造商 Solaris 研发的混合动力客车以及Urbino 纯电动客车,奔驰的轻中型商用车配备了 TRW 公司研发的 EPHS-Gen C。ECHPS 可以分为 3 类:油压反馈控制式、流量控制式、阀灵敏度可变控制式[7]。
流量控制式在 HPS 的基础上增加了一个电机和 ECU,用电机代替发动机带动油泵转动,根据车速和转向盘手力矩通过 ECU 提供助力矩;油压反馈式在传统的 HPS 系统上进行改造,采用先进的电子装置、电液转换器、液压反应装置,根据车速改变电液转换器阀口开口的大小,进而改变反应室的油压;阀灵敏度可变控制式对转向控制阀的阀芯做了进一步的优化,并增加了车速传感器、电液比例阀和 ECU 等,电液比例阀的开度由车速控制,进而控制动力转向控制阀的阀灵敏度来控制油压。
ECHPS 虽然解决了转向助力值随车速可调,但缺点是阀的结构比 HPS 复杂,并且成本高,并且要考虑附加装置如电机、传感器的空间布置。
电动助力转向系统的助力矩由助力电机提供,ECU 根据车速、转向盘转矩输出相应的转向助力矩。EPS 不仅具备助力随速可调,还具有回正性能好、操作稳定性好等优点。EPS 最早被日本的富士重工、NSK、Shower、Koyo 等企业应用在乘用车上,并且一般装配于微型车上,由于受到助力电机功率的限制,要将 EPS 应用于重型商用车上需要的电机体积很大,就目前在 4.5t 的小型货车上使用的 EPS 功率就达到了 900W[8],而一般中重型的商用车少则达到 10t,在考虑成本和电机的安装上问题上都不是市场化的最佳选择,因此关于商用车 EPS 的研究都是围绕轻型商用车,并且多是理论研究,很少有产品化的应用[9][10][11]。
基于上述关于商用车转向助力系统的讨论,传统的 HPS 无法兼顾不同车速时对转向手力的不同要求,低速时的转向沉重与高速时的转向发飘是一对矛盾;ECHPS 也只能实现简单的助力随车速可调;EPS 虽然能满足较好的“路感”、良好的操纵稳定性和回正性能,但是无法实现在中重型商用车上安装。为了使商用车的转向系统即能满足像 EPS 一样的转向性能,又能在中重型商用车上实车安装,本文设计了一种新的商用车转向助力系统:从转向系统的结构入手设计了商用车电液耦合转向系统机械结构;分析了驾驶员的理想转向手力特性,设计商用车电液耦合转向系统助力控制策略;通过软件仿真验证了控制策略的有效性,并根据设计的商用车电液耦合转向系统结构搭建商用车电液耦合转向系统硬件在环试验台,进行硬件在环试验,保证设计的转向控制策略将来在实车上应用的可行性。
本文研究的商用车电液耦合转向系统能通过电子控制单元产生最佳的转向手力矩给驾驶员,并且能应用于各类轻中重型的商用车。对于典型的装卸车辆来说,时常处在低车速大转角输入的工况,在安装了商用车电液耦合转向系统后,驾驶员的转向负荷能减少约 75%[12]。对于长途运输车辆,高速时的车道保持是常见的行驶工况,电液耦合转向系统能减少驾驶员转向中心区的误操作。这种结合了车速感应型转向助力与转向中心区操作稳定性的商用车电液耦合转向系统能有效的提高商用车转向系统的性能。
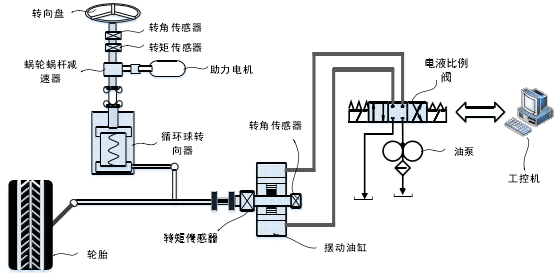
商用车电液耦合转向系统如图 1.1 所示,在传统的液压助力转向系统上添加了 EPS的硬件结构,该硬件主要包括助力电机、转矩传感器、转角传感器,EPS 单元的上端与转向盘连接,下端与循环球转向器或齿轮齿条转向器连接。但是与乘用车的 EPS 有些不同,商用车电液耦合转向系统在增加了 EPS 的同时保留了循环球液压助力转向系统,因为在转动轴荷重的转向轴时液压助力转向系统具有效率高、经济、耐久性、可靠性好等优点,用于承当主要的转向助力,转向系统中转向柱上的助力电机则用于调整反馈给驾驶员的转向手力矩。
电液耦合转向系统控制设计:
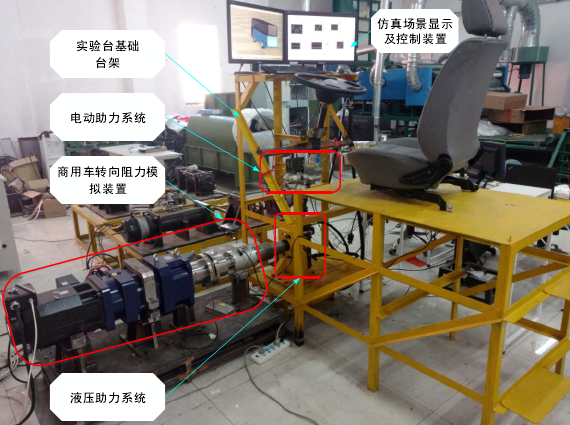
商用车电液耦合转向系统试验台架

PXI 机箱
电液比例加载原理图
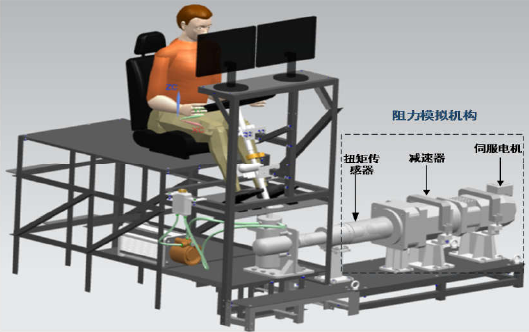
转向阻力加载机构
伺服电机及驱动器

行星减速器
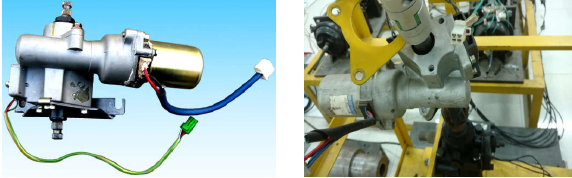
转向助力电机及安装位置
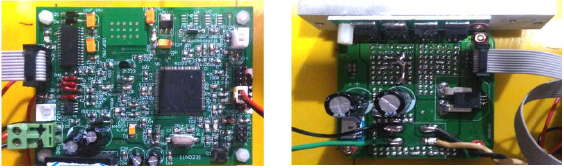
助力电机控制器与驱动器

液压油泵和循环球液压助力转向器

KISTLER 转矩转角传感器
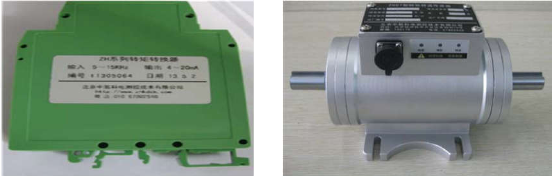
F/V 信号转换器和 ZH07—5000 扭矩传感器
目录
第 1 章 绪论
1.1 研究背景及意义
1.2 商用车电液耦合转向系统概述
1.3 商用车电液耦合转向系统研究现状
1.3.1 国外研究现状
1.3.2 国内研究现状
1.3.3 国内外研究现状总结
1.4 本文研究内容
第 2 章 商用车电液耦合转向系统建模与验证
2.1 商用车电液耦合转向系统构成
2.2 商用车电液耦合转向系统建模
2.2.1 液压助力系统建模
2.2.2 转向机械系统建模
2.2.3 助力电机数学模型
2.2.4 商用车电液耦合转向系统总模型
2.3 商用车电液耦合转向系统模型验证
2.4 本章小结
第 3 章 商用车电液耦合转向系统控制策略及仿真验证
3.1 商用车转向控制策略整体架构
3.2 商用车转向助力特性曲线设计
3.2.1 商用车转向助力特性曲线设计原理
3.2.2 驾驶员理想转向力矩分析
3.2.3 商用车转向助力特性曲线
3.3 转向助力控制策略
3.4 转向回正及阻尼控制策略
3.5 电液耦合转向系统控制策略软件仿真平台搭建
3.6 电液耦合转向系统控制策略的仿真验证
3.6.1 助力控制策略与仿真验证
3.6.2 转向回正及阻尼控制策略与仿真验证
3.7 本章小结
第 4 章 商用车电液耦合转向系统硬件在环试验台设计
4.1 商用车电液耦合转向系统硬件在环试验台组成
4.1.1 硬件系统
4.1.2 软件系统
4.2 商用车电液耦合转向系统硬件在环试验台功能
4.3 商用车电液耦合转向系统硬件在环试验台设计方案
4.3.1 商用车电液耦合转向系统硬件在环试验台总体结构
4.3.2 商用车电液耦合转向系统硬件在环试验台工作原理
4.4 实时仿真硬件环境
4.5 试验台阻力模拟系统
4.5.1 转向阻力模拟方案
4.5.2 试验台转向阻力模拟匹配选型
4.6 转向助力系统
4.6.1 转向助力电机
4.6.2 助力电机控制器及驱动器
4.7 液压助力总成
4.8 试验台传感器
4.8.1 转向盘转角传感器
4.8.2 转向盘转矩传感器
4.8.3 阻力模拟转矩传感器
4.9 本章小结
第 5 章 商用车电液耦合转向系统硬件在环试验台验证
5.1 基于 LabVIEW 的上位机软件编程
5.1.1 TruckSim 与 LabVIEW RT 通信程序
5.1.2 阻力模拟加载控制程序
5.1.3 信号采集控制程序
5.1.4 助力电机控制程序
5.1.5 Simulink 实时仿真模型
5.2 原地转向试验
5.3 低速转向试验
5.4 低速转向回正试验
5.5 高速转向回正试验
5.6 本章小结
第 6 章 全文总结与展望
6.1 全文总结
6.2 工作展望
参考文献
致 谢
(如您需要查看本篇毕业设计全文,请您联系客服索取)