24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժҪ
������ʻ����������Ʒ�ĺ��ľ�����֮һ,��Ŀǰ����������ȵ㡣��ָ����������ʻ������,��ʻԱ���Ƴ�����Ӧ�����׳̶��Լ��Գ�����Ӧ�о������ʳ̶�,��Ҫ������ʻԱ�ײٿ��ԡ���ʻ�����м�ʻ�����ԡ���ʻԱ��С���ʻԱ·�С����ٵ����,��������������ǿ,�������������������ϵij��,����ʹ�ó��嶶��Ӿ�,�������´����ᡢ�DZ��̵��ܳɲ����Ĺ���,��Щ���ֲ������������Ӱ�쳵���ļ�ʻ�����ԡ���ǰ������������Ҫ��������Ʒ�������̺���,���ݳ���ʵ��ʵ��������ʦ�ļ�ʻ������������ָ���������,�����ɱ��ϸ�,�������ڽϳ������������ʻ�ԵĶ�������˲̬ʵʱģ��,�����м�ʻģ�������м�ʻ����������,���Խ���ʻ�Ե��о���ǰ��Ԥ�����Ρ�
���������ʻ����峵Ķ�������ϵͳģ����Ҫ������������.?ģ���ܹ�ʵʱ�����ʻ�����˲̬����,�ܹ������ʻ����ص����,�ܹ�֧��Ӳ���ڻ�����Ͷ�ѧ�ƻ�Ϸ��档���е�����ʵʱ����ѧ��ҵ������,������ģ�ʹ���ǻ���MAPͼ����̬ģ��,������Ť��������ת��λ�ò����,���������ô�����������Ť�ز�ͬ��λ,���¶�������ϵ�Ե��̵ĸ�Ƶ����������λ��һ��;������̤��λ��ֱ�ӵ�������������,���������Ʊ��еȼ�ʻ�о��������Щģ����ʵ����������������ǰ�ڽ��г�����ʻ�Է���������,�Ӷ���Ϊ��������ϵͳ����ܳɲ������ܲ����������ƥ���ṩ���ݡ�
������Щ��,�������ڶ�������ϵͳ��ģ��������˴�����̽�����,�����˲��پ���,ͬʱ���������ŷ�չ�ܳ������������ѧģ�͡�����ʵ������������֤������̬������ʵ����̬����һ�¡�Ϊ�˽�һ���о���������ϵͳ��˲̬���̶��������ܵ�Ӱ��,���ĵ����˹����ǰ��������ϵͳģ�ͷ�չ��״,�ڴ˻������ܽ��������ʻ�ԵĶ�������ϵͳ��ģ��صĹؼ�����,�������Щ�ؼ������������µ���峹���:
��������,Ϊ������ʵʱ���������ѹ����Ƶ���������������Ť�ز����Լ��������Գ��弤������ͬ��λ����,��ԭ����̬ģ�ͻ�����,��������˻���ʾ��ͼ�ķ�����˲̬Ť��ģ�͡���ģ���ܹ���Ϊȷ�ķ��淢�������ײ��������ĸ�Ƶ���������ҽ����˷������������˻�������ѧģ�͡�ƽ����ģ�͡����������嶯��ѧģ��,�ܹ�ͬʱͬ��λ���������,���ܹ�����ȷ�������������Գ���ļ�����
�������,��Լ�ʻ��е�����������Ҫ������ʵ����������̤������µļ��ٶ�˲̬��Ӧ,���Ľ����������ʻ��еķ�����������ϵͳģ�͡�ģ�Ͱ������㲢Э���������ⲿŤ������ģ��(��ʻԱ��Ѳ�����ơ����������Ƶ�),�Լ��������ڲ�Ť������ģ��(���ٿ��ơ�������ʧ���������ȵ�),�Ӷ����߳���ͨ����Ť���������ͨ����Ť������,��һ������ͬͨ����Ť������ת������Ӧ�Ŀ�����(�����š�����ʱ�䡢�����ǰ��)�������ԭ�еķ�����ģ��,��ģ��Ϊ��Ч��ģ������ʵ���������ϵͳ��Ť�ؾ���,�Ӷ���Ϊ��Ч��ģ���˼�ʻ��С�ͬʱ,����EMSģ�Ϳ��Է����ڶ�����������ϵͳ��ǰ�ڱ궨����֧����������ϵͳ��ͬ���궨��
�����ٴ�,��չ�˶�������ϵͳģ�黯�ֽ�ؼ�������峡�Ϊ��ʵ�ֶ�������Ӳ���ڻ������Լ���ѧ�����Ϸ���,�Լ�ģ���������滻����,��������ģ�ͷ������Ч��,�Զ�������ϵͳ������ģ�黯�ֽ⡣�Ƚ���������ģ�Ͱ��������ṹ��ֳɷ�����������������ܳ�,�����ܳɼ����ֽ�Ϊ�����������ܳ��ڲ����ڸ��ӳ̶Ȳ�ͬ��ʹ����Ƶ����������,Ϊ�˽���ɴ˲����ĸ��Է�������,���IJ����˶�����Runge-Kutta��Rosen-Brock��ϵĻ��ַ����������,������Ч����߷���Ч�ʡ��ȶ����Լ����ȡ�
�������,�����Ķ�������ϵͳģ�ͼ��ɵ�����ģ���н���ʵ�����ؿ���֤�����м�ʻ�����˲̬���̵����߷���,����������ģ����ԭ��ģ�ͽ��з���Ա�,���������ģ�Ͷ�����˲̬���̷��������������Ե�������ͬʱ,����ģ�ͼ��ɵ���ʻģ������,��Ƕ�����Ĺ�����ҵ����WAVE-RTȼ��ģ��,����ģ���������µĶ�������ϵͳӲ���ڻ����档����������,����ģ�������ԭ��ģ���ڼ�ʻ����ص�����˲̬������ʹ��ʻԱ���и�Ϊ����ļ�ʻ���,ģ�����������˶�����˲̬���̵ķ�������,�Ӷ���Ϊ��Ч����Ԥ�����ν��м�ʻ���������ۡ�
�����ؼ��ʣ���ʻ��,˲̬,ģ�黯,������������ϵͳ,��������ϵͳģ��
ABSTRACT
����Drivability is one of the core competitiveness of automotive products, but also the current research hotspot. It refers to the ease degree that drivers control the vehicle response and the comfort of the vehicle response during the longitudinal driving process, including the driver easy handling, driving comfort, the driver's somatosensory, the driver's road feeling.
����The increase of vehicle speed, the increase of engine power, the shift of the transmission and the impact of the clutch combination will make the body tremble intensified, and even lead to resonance of the transmission shaft, dashboard and other assembly parts. These adverse phenomena will seriously a��Fect the vehicle driving comfort. At present, in the later stage of the automobile product development, the automobile manufacturer designs the vehicle guided by the driver's subjective evaluation of the drivability according to the actual vehicle xperiment. It is an effective way to carry out the research on drivability by establishing the quasi-transient real time model of power transmission carring out driver's subjective evaluation based on driving simvilator.
����Powertrain system model for vehicle drivability research needs to meet the following requirements: The model can simulate the transient phenomena associated with the drivability in real time. The model can simulate the drivability related road feeling and somatosensory. The model supports hardware in the loop simulation and multi-disciplinary hybrid simulation. The existing commercial software in real-time vehicle dynamics, the steady-state engine model model based on MAP diagram lead to the engine torque is not related to the crank angle position; the different phase of the engine mount force and the crankshaft torque leads to the high frequency excitation phase that the power transmission system input to the chassis is inconsistent; It can not describe the push back feeling and other driving feeling taken the accelerator pedal position as a throttle input. Therefore, these models can not be used to carry out vehicle drivability simulation and evaluation in the early stage of the automobile development process, so as to not be able to provide the basis for the design and matching of relevant components and functional components of the powertrain system.
����In recent years, the research group has done a lot of research on the modeling of the powertrain system^ and accumulated a lot of experience. At the same time,the research group has a very mature vehicle dynamics model. A large number of real vehicle field tests verify that its steady-state performance is consistent with real vehicle steady-state performance. In order to further study the influence of the transient process of the powertrain system on the performance of the vehicle, the current development status of the powertrain system model at home and abroad is investigated in this paper. On this basis, the key problems related to the modeling of powertrain system for vehicle drivability is summarized.
����The following research work on these key problems are carried out:
����Firstly, in order to describe and real-time simulate the crankshaft torque fluctuation caused by the high frequency excitation in the cylinder and the same phase characteristic of the mounting force on the vehicle body, based on the original model, the engine transient torque model based on the indicator diagram is presented to simulate the high frequency excitation generated by the fluctuation of engine cylinder more accurately. The engine crajok-link mechanism statics model, the balance axis model, the engine body dynamics model are established to simultaneously output the the mounting force with the same phase and more accurately described the excitation for the vehicle body.
����Secondly,the evaluation for driving somatosensory requires a more realistic description of the acceleration transient response with the accelerator pedal operation. Therefore, a virtual engine control system model for driving somatosensory is established. The model includes the modules of the calculation and coordination of the engine external torque demand (driver, cruise control, transmission control, etc.) as well as the engine internal torque demand module (idle control, loss of accessories, catalyst heating, etc.)to determine the the fast channel torque requirements and slow Channel torque requirements and fUrther to convert the different channel torque requirements into the corresponding control variables (throttle, injection time, ignition advance angle). The model is more effective to simulate the driving somatosensory, and can be used in the pre-calibration of the powertrain control system and the synchronization calibration of other control systems.
����Thirdly,the key problems research on the powertrain system modular decomposition is carried out In order to realize powertrain hardware in the loop simulation and multi-disciplinary Co-simulation, at the same time in order to upgrade and replace the model easily, and in order to improve the computational efficiency of simulation model, modular decomposition of powertrain system is carried out. The powertrain model is divided into the engine, gearbox and other assemblies according to the vehicle structure, and each assembly continues to be divided into components. In this paper, based on the existing numerical integration methods, the multi-rate Runge-Kutta and Rosen-Brock combined method with high stability and efficiency is proposed.
����Finally, the powertrain model built in this paper is integrated into the vehicle model for objective verification. The transient simulation of the driving process is carried out, and the simulation results of the model and the traditional model are compared. The results show that the model can obviously improve the transient simulation ability of the vehicle. At the same time, the model is integrated into the driving simulator, and co-simulates with the international mature commercial software. Powertrain system hardware in the loop simulation driven by a driving simulator is carried out. Compared with the traditional model, the difiference of the subjective feeling of driver in the drivability related transient process between the model and the traditional model further shows that the model can enhance the simulation ability of the vehicle transient process and realize the more efifective drivability subjective evaluation.
����Keywords: drivability, quasi-transient, modular, virtual engine electronic control system, powertrain system model
������ʻ�����ԡ���ʻԱ��С�·�е���������ʻ�Ե���Ҫ�������ݡ����ų��ٵ����,������������ǿ,��ʻ�����еĶ������Ʊ��еȻ�Ӱ��������ʻ��,��˼�ʻ�Գ�Ϊ������Ʒ�ĺ��ľ�����֮һ����ǰ,������ʻ����Ҫ����ʵ���������������������,�������մ�����ڲ�Ʒ��������,���ü�ʻģ�������м�ʻ����������Դ�����̿�������,���Ϳ������ա����,�����ʻ�ԵĶ�������ϵʵʱ����ѧģ�Ϳ����ǵ�ǰ������峵��ȵ�֮һ��
�������е�ʵʱ��������ѧ��ҵ�����еĶ�������ϵͳģ��,���ܺܺõ�֧�ּ�ʻ����峡����������:������ģ�ʹ���ǻ���MAPͼ����̬ģ��,������Ť��������ת��λ�ò����,���������ô�����������Ť�ز�ͬ��λ,���¶�������ϵ�Ե��̵ĸ�Ƶ����������λ��һ��;����ģ�ͽ�����̤��λ��ֱ����Ϊ����������,���������Ʊ��еȼ�ʻ�о��������ʻ����������,���Ľ����˶�������ϵͳ˲̬��ģ���,���а�����������ʾ��ͼ�ķ�����˲̬ģ��,�������ⷢ������ص�Ԫ,�Լ����Ƕ��ʽ�������ж�������ϵͳģ��ģ�黯�ֽ�Ĺؼ������о���������Ҫ�����������:
��������ʾ��ͼ��˲̬������ģ�͡���Դ�ͳ�ķ��������Ť�ؽ���ת���йض���ת��λ���ص�����,�����������ʾ��ͼ����������ģ��,ʵ��������Ť����ת��720�Ȳ������Ե�ʵʱ����,ͬʱ�õ��뷢����Ť����λһ�µ�������,ʵ���˶�������ϵͳ�Ե����{Ƶ��������,�����˼�ʻ�����е�˲̬����
���������ʻ��з���ķ����������ص�Ԫ��ģ��������ģ��ȱ����ص�Ԫ���Ʋ���,������һ��������ʽ������,����ͬһ����̤��λ�ö�Ӧ�ļ��ٶ���ʵ������ϴ�Ϊ��,���Ľ���������������ϵͳģ��,�ܹ����泵�����ٶ��ڼ���̤������µ�˲̬��Ӧ,ʵ���˼�ʻ��е�ȷģ�⡣
������������ϵͳģ�黯�ֽ⡣���Ľ�����Ķ�������ϵͳģ���ݹ���ʦ������ʵ�������ṹ����ģ�黯�ֽ�,ʵ����ģ�͵Ŀ��źͶ�ѧ�ƻ�Ϸ���,ʹ�þֲ�ģ�������ر�,�Ӷ�ʹ�ⲿģ���滻�ֲ�ģ��,����֧��Ӳ��ʵ���������ҵ����ģ�͵�Ƕ�롣
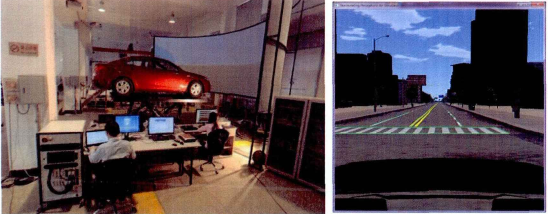
����������������·��,���ijɹ����һ��˲̬��������ģ�͡�������ģ������ʳ��췢������ҵ����WAVE-RTȼ��ģ�����Ϸ���,���������ʻģ�����Լ�dSPACE��ɼ��ɵ�Ӳ���ڻ�ʵʱ����ƽ̨���ڴ���Ӳ������ƽ̨��,����ʵʱ����,������������ԭ�еĶ�������ϵͳ����ģ�ͶԱȡ����������������ģ���ܹ������������˲̬����,�����ܹ����ּ�ʻԱ��ʵ�ļ�ʻ���,������������������ʻ���о���
����������ʻ�ԵĶ�������ϵͳ��
������ʻ�ԵĶ�������ϵͳ
����n��(50%)�����·�������һ���������ڻ����ϵ�������
������(50%)�����·����������ڽ�
Ŀ¼
������1�� ����
��������1.1 ��������
��������1.2 ��������ģ����о�����
������������1.2.1 ������������ȼ��ģ�͵����ͼ�Ӧ��
������������1.2.2 ��������е����ѧģ�ͼ�Ӧ��
��������1.3 �����ʻ�Ե�������������ع���ϵͳ�о���״
��������1.4 ����ϵ��ģ�о�����
������������1.4.1 ����ϵͳģ�ͻع�
������������1.4.2 ���г�������ѧ��ҵ�����д���ϵ��ģ��״
��������1.5 ������Ҫ�о�����
������2�� ����ʾ��ͼ�ķ�����˲̬ʵʱģ���о�
��������2.1 ����
��������2.2 ����ʾ��ͼ�ķ�����˲̬ģ�ͼܹ�
��������2.3 ����ʾ��ͼ�ķ�����ȼ��ѹ��ģ��
��������2.4 ��������е����ѧģ�ͽ������������Ƶ�
��������2.5 ��������е����ѧģ�黯ģ��
������������2.5.1 �������������˻�����ģ
������������2.5.2 ������������ת����ѧ��ģ
������������2.5.3 ���������嶯��ѧģ��
��������2.6 ���������ù��ܲ���ģ��
��������2.7 ������
������3�� �����ʻ�Եķ�����������ϵͳ���ܽ�ģ
��������3.1 ����
��������3.2 ����Ť�ؿ��Ƶķ�������ع���ϵͳ��������
��������3.3 �����ʻ���о��ķ�����������ģ��������
��������3.4 Ť�ؼ���ģ��
������������3.4.1 ��ʻԱŤ������
������������3.4.2 Ť����ֵģ��
������������3.4.3 Ť����ʧģ��
������������3.4.4 Ť�ؼ��㸨��ģ��
��������3.5 Ť��Э��ģ��
��������3.6 Ť��ת��ģ��
��������3.7 ������
������4�� �����ܳ����Ե���������ϵͳʵʱģ�ͽ�ģ
��������4.1 ����
��������4.2 ��еϵͳ���ֵ��͵�ģ�黯�ָ�����ڶ�������ϵͳ��Ӧ��.57
��������4.3 ��������ϵͳŤת�˶������
��������4.4 ����ֹ�������Һ�������ģ��
������������4.4.1 Һ����������ֺ��������ؼ���
������������4.4.2 Һ�����������ֹ�����Ħ��״̬�ж�
������������4.4.3 Һ�����������ֹ�����Ħ�����ؼ���
������������4.4.4 Һ�����������˺�����˼���
��������4.5 ���dz����Զ�������ģ��
��������4.6 ����ϵŤת���Ե�Ч��Ԫģ��
��������4.7 �������Ե�����������������ģ��
��������4.8 �����ģ��
������������4.8.1 ʮ���������
������������4.8.2 ���������
��������4.9 ������ת����ѧģ��
��������4.10 ��ģ��
��������4.11 ����ģ�黯��ģ�Ķ����ʻ�����ⷽ��
������������4.11.1 �����ʡ�RK-Rosenbrock����
������������4.11.2 ������RK-Rosenbrock���������ݽ�
��������4.12 ������
������5�� ����������������̼��ɼ�������֤
��������5.1 ����
��������5.2 ģ�Ͷ����ʻ���ʵʱ����֤
��������5.3 ������������ϵͳģ������̶���ѧģ�ͼ���
��������5.4 ������������̼���ģ�ͳ���ʵ����֤
������������5.4.1 �����
������������5.4.2 �����������ٹ���
������������5.4.3 ˫���߹���
��������5.5 ��ʻģ���������ļ�ʻ����������Ӳ���ڻ�����ƽ̨������
������������5.5.1 Tip��in/Tip��out����������
������������5.5.2 ���ٹ�������
������������5.5.3 ���ټ�ʻ
��������5.6 ������
������6�� ȫ���ܽ���о�չ��
��������6.1 ȫ���ܽ�
��������6.2 �о�չ��
���������
������л
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��