24小时论文定制热线
24小时论文定制热线
摘要
为了解决传统实验教学设备的不足与实验受时间和空间限制等实际问题,基于Unity3D 和 MATLAB 等,采用虚拟现实和增强现实技术,以现实实验为依据,开发了形象逼真、便于操作的机械基础虚拟实验平台。设计了虚拟创新实验平台中的减速器虚拟拆装和连杆机构创新设计两部分内容。
减速器虚拟拆装实验采用三维建模工具 SolidWorks 进行减速器各零部件的三维几何建模,将几何模型导入 3DMax 中,进行贴图、烘焙和材质渲染,将模型保存成 FBX 格式导入到 Unity3D 的资源文件夹 Assets 中。根据交互和运动控制的需求,构建虚拟模型的层次数据结构,对每个模型的父子关系进行设定。通过 C#编程实现实验的具体操作。
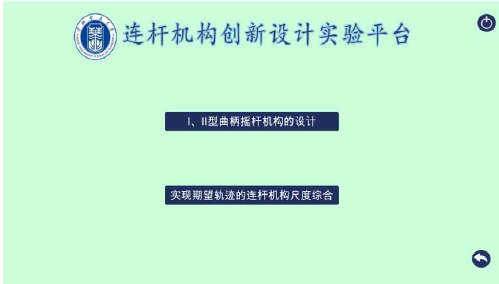
连杆机构创新设计主要包括两部分内容:一是按预定轨迹设计铰链四杆机构,二是按行程速比系数兼顾最佳传力性能设计曲柄摇杆机构。
深入研究了标准位置铰链四杆机构连杆转角的傅里叶级数展开式与任意位置铰链四杆机构连杆曲线的傅里叶级数展开式,提出了一种优化维数低、运算快、吻合度高、与初值无关的曲柄摇杆机构轨迹综合设计新方法。推导出 I、II 型曲柄摇杆机构的各杆长关系、极位夹角θ的最大值、曲柄位置角φ的可行域、最小传动角 γmin的出现位置等。绘制出 γmin-θ-φ的三维曲面图,可直观确定对应行程速比系数 K且传力性能最佳的曲柄位置角,从而得到曲柄摇杆机构的尺度,进行仿真分析。克服了 A 点选择的盲目性,完善了曲柄摇杆机构的设计理论。
关键词:虚拟现实;增强现实;Unity3D;减速器拆装;连杆机构
Abstract
In order to solve the shortcomings of traditional experimental teaching equipment and practical problems such as experiment limited by time and space. Using virtual reality and augmented reality technology, a virtual experiment platform for mechanical foundation with realistic image and easy operation is developed based on Unity3D, MATLAB soft and practical experiment. The virtual innovation experimental platform has contained two parts which are the virtual assembly and disassembly of the reducer and the innovative design of the linkage mechanism.
The virtual assembly and disassembly test of the reducer is divided into three major steps. Firstly, SolidWorks was used to perform 3D geometric modeling of the reducer parts, and then the geometric model was imported into 3DMax to perform texture mapping, baking and material rendering, and finally saved into the FBX format and imported into the Assets3D resource folder Assets. According to the needs of interaction and motion, constructing hierarchical data structure of virtual model is constructed, and the paternity relationship for each model is designed. The concrete operation of the experiment is carried out by C# programming.
The innovative design of the link mechanism mainly includes two parts, namely the design of a hinged four-bar mechanism according to a predetermined trajectory and the design of a crank-rocker mechanism that takes into account the optimal force transmission performance with the ratio of stroke speed ratio.
Standard position basic hinge four-bar mechanism of connecting rod angle Fourier series expansion was deducted and Fourier series expansion of link curve of general position four-bar hinge mechanism was established. A new method of comprehensive trajectory design for crank rocker mechanism was proposed. This method has the advantages of low optimization dimension, fast operation, high coincidence degree and independent of initial value. The length equations of each type I and II crank rocker mechanism are established.
The maximum value of the included angle θ, the feasible range of the crank position angle φ and the position of the minimum transmission angle γ min are obtained. The γ min -θ-φ three-dimensional surface chart was drawn, the figure reflected the stroke ratio K and transmission performance of the best position, the crank rocker mechanism of the scale, and the simulation analysis had carried on. The design theory of crank rocker mechanism is perfected in this paper.
Keywords: virtual reality, augmented reality, Unity3D, decelerator disassembly, linkage mechanism
机械学科传统的教学方式分为理论教学和实验教学。理论教学是以教授学生理论、原理和方法为主。实验教学作为理论教学的必要辅助实践环节,可以帮助学生提升创新技能,增强动手能力,有利于消化和巩固所学理论知识,具有理论教学无法替代的重要作用。
机械基础学科主要包括《机械原理》、《机械设计》、《机械设计基础》等课程。这些课程是机械设计的敲门砖,承接着《工程力学》等基础课,后启着《机械装备设计》等专业课,是对学生进行设计能力、创新能力、工程训练的重要机械基础课,在工程专业人才培养中占有核心地位,恰到好处的实验设置有利于人才培养目标的实现。随着高校的扩招,机械基础学科传统实验存在的突出问题表现在:一是现有的实验设备较少,无法实现人手一套进行实验操作,大大限制了学生的实操性;二是实验设备陈旧,实验室面积不足等。而虚拟实验的开发和应用可以解决上述问题,具有很好的应用前景和推广价值。
减速器涵盖了轴、轴承、箱体、箱盖、螺栓、齿轮传动、带传动等《机械设计》、《机械设计基础》课程的主要零部件,这些零部件的设计计算、内外部结构、零件间的相互配合关系等都是学生必须掌握的重点内容。传统的减速器实物装拆易造成零件损坏及丢失、人员受伤等,更重要的是现场装拆实验的时间有限,一两次实验不能完全掌握其复杂结构。
连杆机构的创意设计是《机械原理》课程的重要内容。按给定的行程速比系数K、摇杆的摆角?设计曲柄摇杆机构和反推实现期望轨迹的连杆机构尺度一直是学生创新设计的难点和重点,学生经常采用的试凑法和图解法,过程复杂且精度极低。
针对上述问题,本论文综合运用 Unity3D、3DMAX、MATLAB、C#等,研究开发减速器虚拟拆装和连杆机构创新设计两个教学实验。课题来源于教育部在线研究基金项目“慕课环境下机械基础虚拟实验平台的开发与应用研究”,编号 2016YB117 和河北省高等教育教学改革研究与实践项目“能力导向 学训结合的机械原理及设计优质创新性资源共享平台的构建”,编号2015GJJG084。随着我国经济实力的不断提升,教育事业越来越受重视,高等教育的人才培养质量备受关注。而实验教学对培养学生的创新能力具有重要的作用,是实现校企快速对接的重要途径。书本中的知识通过实验可以得到更深入的理解和进一步的验证[1]。但是,目前我国实验教学受到一些硬、软条件的制约,存在许多不足之处,如实验教学资金投入不足,实验设备陈旧,实验环境存在安全隐患,招生人数的增多与设备套数不匹配等,这些因素严重制约着实验教学的发展[2]。
机械基础学科主要包括《机械原理》、《机械设计》、《机械设计基础》等课程。《机械原理》、《机械设计》是机械设计的敲门砖,承接着《工程力学》等基础课,后启着《机械装备设计》等专业课,是对学生进行设计能力、创新能力、工程训练的重要机械基础课,在工程专业人才培养中占有核心地位,是机械学科教育教学改革的重点和难点。随着高校的扩招,现有的实验设备仅仅起到示教的作用,无法满足每个学生人手一套进行实验操作,大大限制了学生的实操性;高校中还存在实验设备陈旧,实验室投资不足的现象,而虚拟实验的开发和应用可以解决上述存在的问题,具有很好的应用推广价值[3]。
为了改变传统实验的不足,从实验方式、人才培养、教育理念发展前景出发,将理论分析、机构或机器的设计、虚拟装拆、仿真分析、实物实验有机结合,开发形象逼真的三维虚拟实验系统,达到以实促虚,虚实结合的目的,学生完全不受时间和地域的限制,可以利用业余时间在网上模拟真实实验环境,依据实验前预先设计的构思方案,在操作界面上输入相关命令,拖拽鼠标或扫描二维码在手机上操作即可进行与实际效果相同甚至优于实际实验的效果,可反复实验,学生手脑并用,可以掌握综合设计和多元分析方法,促进理论与实践的融合,对提高学生的设计能力、空间想象能力等无疑会起到极大的促进作用。在保证传统实验教学的基础上,开展虚拟实验教学,使二者互为补充,互相促进,必将会显着地提高课程的教学效果[4-9]。
机械虚拟创新实验平台设计与实现:
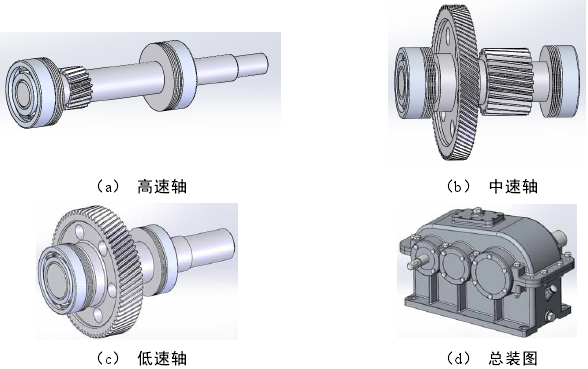
减速器的三维模型
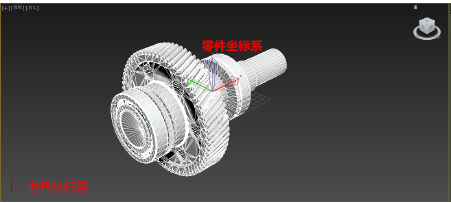
调整零件坐标系
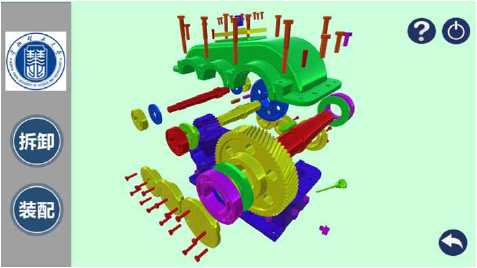
自动拆装场景图
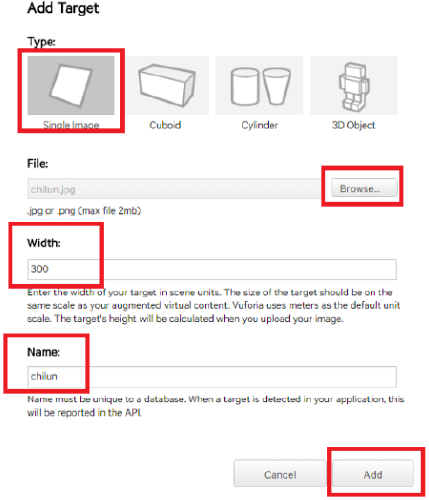
Add Target

增强现实场景图
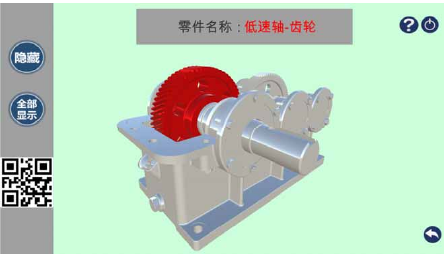
认知场景图
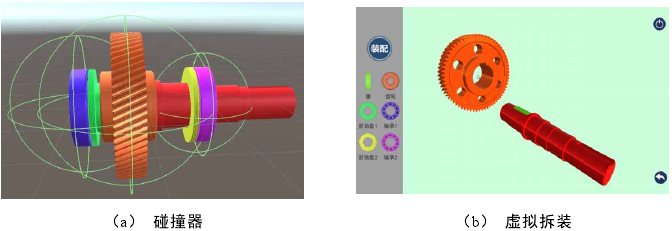
虚拟拆装场景图
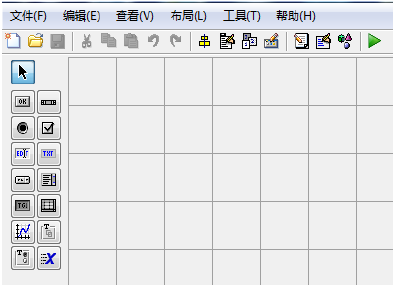
图形用户界面
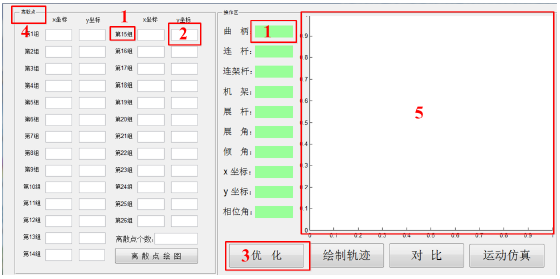
实例图形用户界面
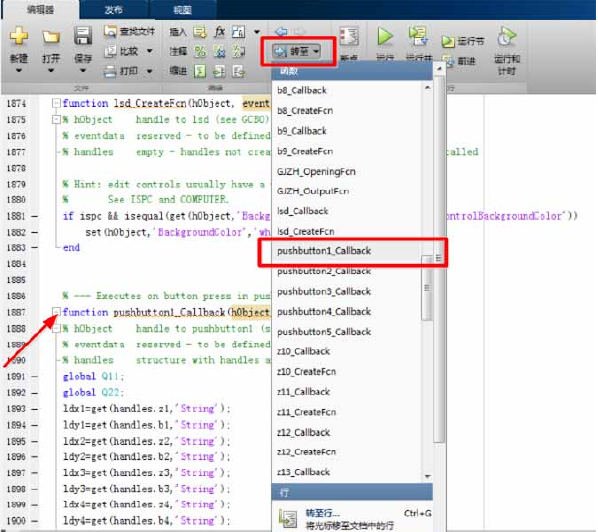
回调函数的编写
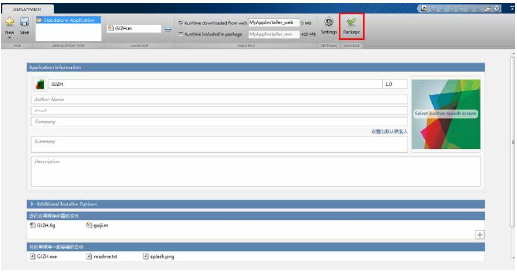
deploytool 工具箱
Unity3D 的搭接
目录
引 言
第 1 章 绪论
1.1 课题的来源
1.2 研究背景与意义
1.3 虚拟现实技术
1.4 虚拟实验平台的研究现状
1.4.1 国外研究现状
1.4.2 国内研究现状
1.5 主要工作及各章内容安排
第 2 章 Unity3D 环境下的虚拟现实与增强现实
2.1 虚拟现实引擎 Unity3D
2.2 Unity3D 中的重要概念
2.2.1 局部坐标系与世界坐标系
2.2.2 父子物件
2.2.3 摄像机
2.2.4 碰撞检测
2.2.5 组件
2.2.6 预置
2.3 增强现实
2.3.1 增强现实简介
2.3.2 增强现实关键的技术
2.3.3 增强现实实现方法
2.3.4 基于 Unity3D 的增强现实技术
2.4 小结
第 3 章 连杆机构创新实验的理论研究
3.1 实现期望轨迹的四杆机构优化综合
3.1.1 连杆曲线数学模型的建立
3.1.2 连杆曲线的傅里叶级数表示
3.1.3 基于 FFT 提取连杆曲线的谐波特征参数
3.1.4 优化计算
3.1.5 四杆机构相关参数的计算
3.1.6 连杆轨迹与期望轨迹重合度的对比
3.2 I、II 型曲柄摇杆机构的创新设计
3.2.1 I、II 型曲柄摇杆机构的定义
3.2.2 相关参数取值与数理关系的推导
3.2.3 给定摇杆摆角 ? 设计曲柄摇杆机构
3.2.4 I、II 型曲柄摇杆机构的传力性能分析
3.3 小结
第 4 章 减速器虚拟拆装实验平台的功能设计与实现
4.1 3D 模型
4.1.1 三维模型的建立
4.1.2 调整零件坐标系原点
4.2 约束关系及装拆路径规划
4.3 虚拟自动拆装功能的实现
4.3.1 减速器的自动拆装
4.3.2 全方位浏览
4.4 零件浏览与认知
4.4.1 增强现实模式的开发流程
4.4.2 场景的设置
4.5 虚拟拆装场景的设计与实现
4.5.1 虚拟拆装场景的设置
4.5.2 虚拟装拆编程
4.6 小结
第 5 章 连杆机构创新设计平台的功能设计与实现
5.1 系统的开发
5.1.1 图形用户界面的创建
5.1.2 回调函数的编写
5.2 软件的封装与发布
5.2.1 MATLAB Compiler 概述
5.2.2 MCR 编译过程
5.2.3 程序的发布
5.3 运行实例
5.4 Unity3D 的搭接
5.5 小结
结 论
参考文献
致 谢
导师简介
作者简介
学位论文数据集
(如您需要查看本篇毕业设计全文,请您联系客服索取)