24小时论文定制热线
![]()
24小时论文定制热线
![]()
摘 要
近年来,四旋翼飞行器技术及应用呈井喷式发展,因其成本低廉、机动灵活、维护方便等特点,被广泛应用于军事和商业民用领域。四旋翼飞行器技术涉及了电子通信、材料、控制等众多技术领域。本文在综述了四旋翼飞行器的发展现状、发展趋势及关键技术的基础上重点研究了四旋翼飞行器的动力学建模、姿态解算算法和姿态控制算法,并通过控制系统仿真实验验证了所设计算法的有效性。最后从硬件与软件设计两方面入手设计了飞行实验平台用以验证算法的有效性和实用性。本文主要研究内容与成果包括:
首先,基于四旋翼飞行器飞行原理对飞行器所受合外力及力矩进行理论分析,在双坐标系下根据牛顿-欧拉方程建立四旋翼飞行器动力学模型。
其次,基于动力学模型设计了姿态解算算法及控制算法,并在 MATLAB\simulink仿真环境中建立控制系统仿真模型以验证算法。先对传感器测量数进行初步的滤波处理以获得较为准确的传感器测量数据;再经过互补融合校正,得到精确的陀螺仪数据,采用一阶龙格-库塔法求解微分方程得到当前机体精确的姿态信息。接着采用双闭环串级PID控 制算法对系统的内环(姿态环)和外环(位置环)控制器进行设计。控制器输出各电机控制信号对电机转速进行调节实现对飞行器姿态及位置的控制。
最后,基于 STM32 微型处理器从硬件与软件两方面入手设计制作了四旋翼飞行器原型机作为飞行实验平台,用于在前期获得建立仿真模型的各项参数以及后期对控制算法进行实际飞行测试实验。从理论和实际两个方面来全面验证算法的有效性和实用性。
仿真实验结果显示:所设计控制器对目标信号有很好的跟踪效果,并且最终能够准确到达目标位置并保持姿态稳定;在进一步的实际飞行平台测试结果表明:姿态解算算法能很好的改善数据的精确程度,而且双闭环串级 PID 控制器也具有良好的综合性能。
关键词:四旋翼飞行器;建模;四元数互补滤波;双闭环串级 PID 控制;仿真
Abstract
In recent years, the technology and application of Quad-rotor aircraft show blowout development, its low cost, flexible and convenient maintenance make it widely used in military and commercial civil fields.The technology of Quad-rotor aircraft relates to many technical fields such as electronic communication, material and control.In this paper, firstly I summarized the development status, development trend and key technology of Quad-rotor aircraft, then emphatically researched the dynamic modeling, attitude calculation algorithm and attitude control algorithm, and the validity of the proposed algorithm is verified by the simulation experiment of the control system.Finally, from the hardware and software design, the flight experiment platform is designed to validate the validity and practicability of the algorithm. The main contents and achievements of this dissertation include:
Firstly, based on the principle of the Quad-rotor flight vehicle, the force and torque of the aircraft are analyzed theoretically, and the kinetic model of the Quad-rotor aircraft is established under the Newton-Euler equation in two coordinates.
Secondly, the attitude algorithm and control algorithm are designed based on dynamic model, and the control system simulation model is established to validate the algorithm in the MATLAB\simulink simulation environment.Firstly, the sensor measurements are filtered to obtain more accurate sensor data. Then via the complementary fusion correction, the precise gyro data is obtained, and the first order Runge-Kutta method is used to obtain the precise attitude information of the current organism. And then a double closed loop cascade PID control algorithm is used to design the inner loop (posture ring) and the outer ring (position Ring) controller.The controller outputs the motor control signals to regulate the motor speed and control the attitude and position of the Quad-rotor.
Finally, based on the STM32 Micro processor, the prototype of the Quad-rotor aircraft is designed as a flight experiment platform from both hardware and software,which is used to obtain the parameters of the simulation model and the actual flight test experiment of the control algorithm in the early stage.The validity and practicability of the algorithm are verified in both theory and practice.
Simulation results show:The Designed controller has good tracking effect on the target signal, and can finally reach the target position accurately and maintain the posture stability;In further actual flight platforms test results show:attitude calculation algorithm can improve the accuracy of data, and double closed loop cascade PID controllers have good comprehensive performance.
Keywords:Quad-rotor aircraft;Setup pattern;quaternion Complementary filtering;Double closed loop Cascade PID Control;simulation
四旋翼飞行器具有结构简单、灵活性好、故障率低、制造及维护成本低廉等优点。其最初研究目的是基于军事方面的需求。因其在多次局部战争中的卓越表现,逐渐得到各国重视遂对其展开研究。随着 EDA、通信及先进材料等技术的迅猛发展,四翼飞行器技术的发展有了质的飞跃。近年来,四旋翼飞行器不仅在外部造形上更加个性独特,而且其性能也越发先进。从开始的通过手动遥控操作到 GPS 自动导航飞行、定高巡航,到如今的自动避障与全天候自主路径规划飞行甚至通过人的大脑来控制飞行器[1]。
四旋翼飞行器优异的性能致使其应用范围越来越广。在军用方面,用于完成战场侦察和监视、定位校射、战场毁伤评估、电子破坏打击等,也可作为靶机用于火炮、导弹的靶标;在民用方面,目前有警用(交通路况)、城市管理(规划建设)、农业(植保)、地质(遥感航拍图片)、电力(线路巡检)、抢险救灾、电影拍摄等行业应用[2]。对四旋翼飞行器技术的研究涉及的学科、领域相对较广,可以为控制理论、传感检测以及计算机通信技术等诸领域的融合研究提供一个相对较好的平台。所以本课题在理论与实际应用中都相当具有研究意义。
惯性导航技术是利用测量元件测出载体运动的线加速度和角速度,经过数据融合得出当前载体的姿态导航信息。四旋翼飞行器的姿态检测技术属于惯性导航技术的一种。
惯性导航系统是多传感器组合而成的系统,其技术核心是姿态解算算法与各传感器数据滤波融合算法的设计。常用的姿态解算算法有:欧拉角法、方向余弦法、四元数法等。欧拉角法比较直观,但在解方程时存在奇点现象;方向余弦法虽然避免了奇点的问题,但需要解的微分方程比较多,造成计算量较大的问题;四元数法虽然存在不可交换性误差的问题,但是它计算量小且结果相对精确。所以在实际中应用比较广泛[16]。常用的数据融合算法有:梯度下降、扩展卡尔曼滤波、互补滤波等算法[17]。
梯度下降算法是一种迭代求极值的方法,也就是求一个多维的导数(梯度)作为函数值增加的方向,按步长逐渐逼近目标值。同理,逆向逐步减小函数值即可求出函数的极小值。该方法精确度较高但步长较难确定,步长太大数据会出现波动,步长太小则收敛较慢[18]。
扩展卡尔曼滤波算法是一种适用于近似线性化、高斯环境的算法,其基本思想是利用前一时刻估计值和现时刻的观测值来更新状态变量的估计值,从而得出当前时刻的估计值。计算流程为:围绕状态估值对非线性模型进行一阶 Taylor 展开,然后先根据初始估计值计算协方差,根据得出的协方差推进状态变量估计,接着计算卡尔曼增益,再由观测数据更新估计值。由增益和新的估计值计算出新的协方差,接着更新变量,依次循环最终得到精确的最估计值。经实际验证,扩展卡尔曼滤波算法能精确融合数据且具有实时性强、稳定性高等优点。但容易出现发散问题,对初始状态值不好确定且对硬件要求相对较高[19];互补滤波算法利用频率来分辨和消除噪声,其原理是利用加速度计与磁力计的校正误差来补偿陀螺仪的漂移误差。互补滤波算法原理相对简单,对惯性测量器件精度要求相对较低,适合低成本航姿测量系统的应用[20]。
本文主要目的是研究并设计出适用于微型四翼飞行器的飞行控制系统,保证飞行器能平稳飞行行且拥有快速的姿态反应控制能力和姿态灵活的飞行性能。对此,本文主要的工作如下:
1、研究四轴飞行器的飞行原理并建立起飞行器的动力学模型。
2、设计四翼飞行器的姿态解算方法,在精确解算姿态的前提下采用双闭环串级PID 控制算法对机体姿态进行控制。并在 MATLAB\simulink 环境中对已有模型进行仿真研究,然后将研究结果应用于实际控制。
3、研究 STM32fl03RBT6 芯片、传感测量模块的工作接口原理,从硬件和软件两方面设计实物飞行实验平台以获取仿真参数。然后将仿真确定的 PID 参数应用到飞行实验平台的实际控制器中,并在线微调,实现了飞行器的实时快速响应,验证了算法和方案的有效性和实用性。
四旋翼飞行器控制系统总体设计:
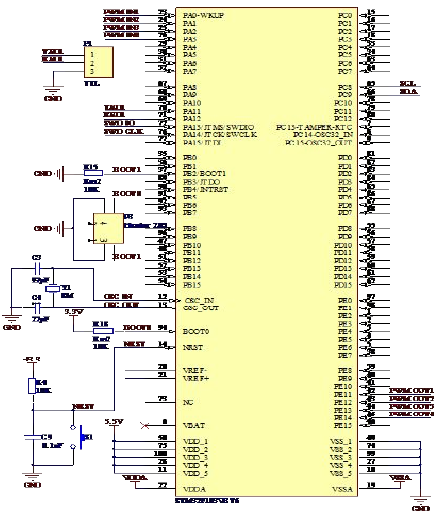
STM32 最小系统
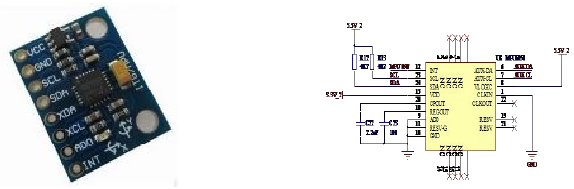
MPU6050 模块实物(a)、接口电路图(b)
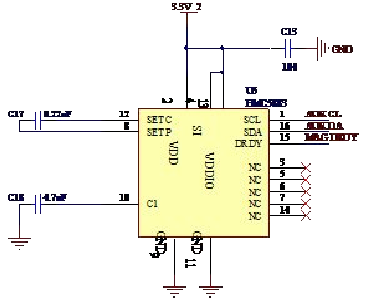
HMC5883L 硬件接线电路图
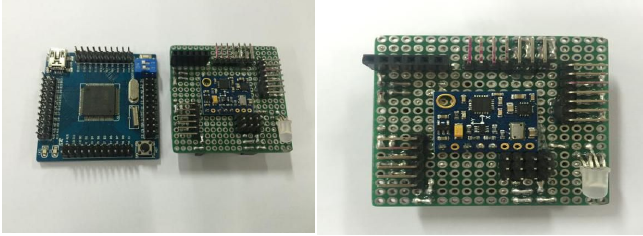
飞控板实物图

电机和桨叶(a)、电调(b)

遥控(a)和接收机(b)
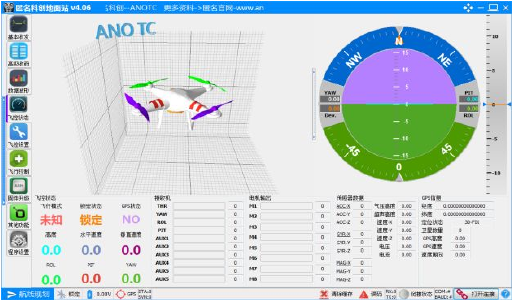
上位机显示界面

花牌 11.1V 2200mah 3S 锂电池组

四旋翼飞行器飞行实验平台

实际飞行测试
目 录
摘 要
Abstract
1 绪论
1.1 选题背景及研究意义
1.2 国内外发展历史与现状
1.3 四旋翼飞行器控制系统关键技术
1.3.1 姿态检测(惯性导航)技术
1.3.2 四旋翼飞行器的控制方法
1.4 本文主要工作
2 四旋翼飞行器动力学模型的建立
2.1 四旋翼飞行器飞行原理
2.2 坐标系的建立及姿态描述
2.2.1、坐标系的建立
2.2.2 飞行器飞行位置姿态描述
2.3 四旋翼飞行器运动学模型的建立
2.4 小结
3 飞行器的姿态解算及控制器设计
3.1 基于四元数互补滤波的姿态检测算法
3.1.1 传感器数据的滤波
3.1.2 传感器数据的融合校正
3.1.3 姿态数据的更新
3.2 控制器设计
3.2.1 PID 控制原理
3.2.2 基于简化模型的双闭环串级 PID 控制算法
3.3 飞行器控制系统的仿真研究
3.3.1 控制系统仿真模型搭建
3.3.2 仿真实验与结果分析
3.4 小结
4 四旋翼飞行器飞行平台总体设计
4.1 飞行系统硬件设计
4.1.1 飞行控制器 MCU 设计
4.1.2 传感测量模块
4.1.3 电调驱动模块
4.1.4 无线通信模块
4.1.5 电源模块
4.1.6 整体飞行实验平台
4.2 飞行系统软件设计
4.2.1 数据采集及姿态解算程序设计
4.2.2 遥控信号输入及电机调速信号输出程序设计
4.3 实验平台飞行测试
4.4 小结
5 结论与展望
5.1 结论
5.2 未来研究工作展望
参考文献
附录
攻读学位期间研究成果
致 谢
(如您需要查看本篇毕业设计全文,请您联系客服索取)