24小时论文定制热线
![]()
24小时论文定制热线
![]()
摘要:在数控车床工作过程中, 切削加工的主要工具是刀架, 而电动刀架是数据车床常用的刀架之一, 其主要有八工位、六工位、四工位几种形式。以四工位PLC编程为例对数控车床中电动刀架的PLC编程设计进行了简单的分析, 以提高电动刀架PLC编程实际应用过程中的稳定性、灵活性。
关键词:数控机床; 电动刀架; PLC编程; 继电器;
在编写PLC程序前, 应就刀架控制程序及下一工作的执行情况进行详细分析, 然后确定整个流程的执行时间, 根据各个工序的需求进行进一步细化。为了避免刀架更换故障对整个数控车床运行造成不利影响, 可设置适当抗干扰措施, 全面分析整个电动刀架工作过程的动作流程, 严格控制突发故障的出现, 为数控车床的顺利运行提供保障。
1、PLC软件工作原理
PLC软件主要分为手动方式、反转同理两个方面。其中, 反转同理主要是当闭合34时, 会出现常开自锁情况, 然后由中间继电器与36进行连接促使刀架反转与编码T一致。同时, 由工位检测信号进行检测, 确定刀架旋转位置的正确, 与经过相关工位位置信号检测控制对刀架位置进行进一步确认, 最后利用辅助继电器进行刀架停转措施。主要工作结构如图1所示。

图1 工作结构图
手动方式主要是随着手动换刀将单位输出电流进行变换, 然后促使M1.1闭合自锁的同时控制继电器接通, 然后在刀架转动到相关位置时松开按键, 刀架位置的检测主要由相关工位的检测信号进行, 同时, 控制辅助继电器进行刀架停转措施。
2、PLC软件设计
2.1、刀位信号处理
数控车床电动刀架PLC编程过程中, 对刀位信号的有效处理是工作正常开展的基础。针对刀位处理的PLC编程如图2所示。
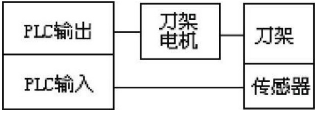
图2 PLC编程图
在读取刀位信号时, 应在相应位置参数中设置刀位总数值, 然后根据刀位数的区别设置相应的辅助继电器, 其中, 总的辅助继电器数值应与刀位总数值相一致;设置操作面板或程序发出换刀指令输到CNC, CNC与PLC输出转接板来控制输出板上的中继的动作从而控制电动刀架的正反转。当从CNC插口过来正转信号为低电平信号时, CNC输入插口信号线低电平有效, 其相对应的中间继电器线圈得电推动常开触点闭合, 输出架电机正端有信号输出, 通过外部电路闭合控制继电器KM1线圈得电, 常开触点KA6闭合时刀转动;当从CNC插口过来的反转信号为低电平时, 其对应输出转接板中的中间继电器线圈得电, 常开触点闭合, 输出端有信号输出, 触点闭合控制继电器KA7线圈得电, 常开触点KA7闭合控制刀架电机反转。在正转与反转到位时, 由刀架四工位的4个霍尔开关控制, 通过霍尔开关反馈回输入转接板检测是否转到位。
另一方面, 当判定是否应进行刀架更换时, 可在确定上次换刀结束后, 接通相应的刀具功能选择信号, 然后对其相应指令进行分析, 即当所对应刀架编号与指令刀架编号相等时不应进行刀架更换;反之, 则更换。在刀架更换过程中, 应注意数控车床中其他部位的报警情况, 在确保情况正常的情况下进行刀架更换, 同时, 在刀架更换信号指令不应重复出现。
2.2、换刀PLC编程
电动刀架更换时主要有4个步骤, 先确认需要更换的刀架置位, 然后对执行指令进行评估, 确定刀架更换指令信号与当前刀架信号不相等, 无其他的刀架转换信号, 可进行正常的刀架正转信号输送, 在检测到刀架信号刀位后, 对指令刀位与当前刀位进行重复核对, 确定两者相等时停止刀位输出, 为下个工序进行预备;在刀架正转信号输送完毕后由于惯性, 刀架会持续进行一段距离, 偏离刀架传感器检测部位。针对这种现象应对刀架刀位信号进行重复检测, 如果出现刀架刀位失误的情况, 应进行刀架正转信号重复置位, 在确保刀架置位正确无误后进行下一环节。
为了确定刀架反锁的程度, 应根据进行刀架反锁时间的参数设置, 根据实际情况确定刀架反锁锁紧时间后, 可确保刀架反锁锁紧停止时间的同时, 可检测相关位置信号的置位、复位工序。如果出现刀架反锁锁紧时间超过或小于预期时可采取换刀报警参数信号的设置, 然后进行下一换刀环节;整个刀架更换结束后, 刀位检测信号的设置需以刀架更换部位为依据, 当确认整个换刀过程正确无误后, 进行相应位置换刀标志的复位, 在相应刀具功能选通信号完全失效后, 进行整个程序信号的复位措施。
2.3、换刀故障处理
换刀故障处理的PLC编程主要是在刀架更换时出现机械卡死状态, 会通过堵转电动机对整个车床系统造成不利影响, 针对这种情况可设置换刀超时报警装置。当刀架更换正转信号输出时, 可在相应位置进行定时处理, 换刀时间可由相应位置的参数设置, 当确定刀架更换时间超出定时器规定的时间时, 接通故障报警信号及换刀结束信号。
一般情况下, 换刀结束信号只有当整个换刀程序完成后才会接通, 但出现换刀时间大于定时器规定的换刀时间时, 会为换刀结束信号的接通带来驱动力, 从而将辅助换刀结束信号发送到系统终端, 在发送刀架为就位及刀架更换超时报警信号的同时, 结束换刀过程, 并将刀架恢复到以往位置, 最后确认刀架未更换完成后, 可进行换刀标识、计时器等相关信号的复位操作。
此外, 在发现刀架更换过程报警信号后, 可编制一个报警处理子程序, 刀架的位置检测信号在任何时候都没有全“0”也没有全“1”的情况, 因此, 当没有刀架电机转动指令时, 或者所有刀位检测信号都为“0”或都为“1”, 则激活PLC报警工作人员提供故障信息。
3、PLC控制系统故障处理及电动调试
3.1、PLC控制系统故障处理
在数控车床运行过程中, 常出现的故障主要有电动刀架某一位置转不停, 而其余刀号位置可以正常转动的问题。电动刀架某一刀号位置转不停主要是由于信号接收线路、霍尔元件损害2个方面的原因造成的, 在处理这类问题时, 可根据相应刀号位置进行发信盘、霍尔元件性能的监测实验, 然后在进行刀位信号系统线路主板的监测, 逐一排查监测, 确定相应刀号故障原因及时采取解决措施。
3.2、电动刀架的调试
在电动刀架使用的过程中, 刀架预紧力过大、刀架内部机械卡死等现象的频繁出现影响了整体刀架工作的效率, 因此应采取定期调试措施, 当旋转刀架出现机械卡死的情况, 可依次检查螺母锁死、夹紧装置位置、润滑系统性能等几个方面, 及时调整螺母状态。
如果出现夹紧装置位置错位时, 可采取反靠棘轮、螺杆之间销孔的重新打孔措施。如果出现润滑系统问题时, 可采取拆卸措施进行润滑处理。刀架预应力过大会导致蜗杆端部不易松动, 且对刀架转动工作造成阻碍, 针对这种现象可采取刀架电机夹紧电流的调小措施。
4、结束语
综上所述, 计算机技术驱动了数控车床工作的发展, 电动刀架是数控车床主要的执行工具, 因此, 针对电动刀架的PLC编程设计非常重要, 在电动刀架PLC编程中主要包括刀架更换、刀位信号处理及报警信号处理几个方面, 同时, 在电动刀架更换过程中会出现机械卡死、预紧力过大等方面的问题, 相关工作人员应及时采取电机调试措施, 保证数控车床系统的正常运行。
参考文献
[1]李省委.数控车床电动刀架及其PLC控制设计[J].机电技术, 2014 (02) :8-10.
[2]潘志.关于数控车床中电动刀架的PLC编程设计[J].电子制作, 2013 (05) :45.