24小时论文定制热线
24小时论文定制热线
摘要:针对地下混合动力铲运机的作业工况和混合动力驱动系统的需求, 设计了混合动力铲运机以主控制器为主, 传统线束和CAN总线通信相结合的电控系统。实现了主控制器对整车各子系统运行状态的采集和控制指令的发送, 实现了作为混合动力驱动系统控制策略载体的主控制器对整车的控制。并搭建混合动力驱动系统试验台架, 对混合动力驱动系统联合调试。通过试验调试, 使得混合动力驱动系统能够根据不同工况选择不同的工作模式, 并实现各种工作模式的平滑切换, 并有效防止了母线欠压、过压等故障, 所设计的控制系统可以满足整车的控制需要, 为实车测试提供参考。
关键词:混合动力; 地下铲运机; 电控系统; 策略; 调试;
Abstract:To the working condition of the underground hybrid LHD and the demand of the hybrid driving system, the electric control system of the hybrid LHD with the main controller, the traditional harness and the CAN bus communication is designed. Enabled the main controller communicate with various parts of the vehicle, provided an effective platform for the main controller controlling the drive system. The main controller of the vehicle to achieve the operation of the subsystems of the acquisition and control instructions to send, as a hybrid drive system control strategy carrier of the main controller of the vehicle control. The hybrid drive system bench was built, and the hybrid drive system joint debugging was analyzed. Through the test and commissioning, the hybrid drive system can choose different working modes according to different working conditions, and realize the smooth switching of various working modes, and effectively prevent the bus under voltage, overvoltage and other failures, the design of the control system can meet The vehicle control needs to provide a reference for real vehicle testing.
Keyword:Hybrid; Underground LHD; Drive System; Strategy; Test;
1、引言
近年来, 电动铲运机逐渐发展, 电动铲运机多采用电缆供电的形式, 不存在柴油机尾气排放污染问题, 但拖曳电缆限制了机器的机动性能和活动范围, 也限制了运行速度。由于两种铲运机的使用局限性, 研究人员逐渐把目光转向了混合动力铲运机的研制[1]。混合动力汽车通过多种动力源之间的配合为整车提供动力, 使其具有与传统车辆相当的长途行驶能力, 没有纯电动汽车续驶里程短的问题。国内外学者对此类车辆的控制系统进行一定研究:文献[2]基于某电动式铲运机, 针对不同工况下发动机和发电机动力匹配性进行分析研究;文献[3]利用AMESim建立了混凝土式搅拌运输车液压混合动力系统模型, 研究了车辆动力性、舒适性、节能性等性能的影响因素;文献[4]利用转矩动态控制策略控制发动机和电机的合成转矩波动在一定的范围以内, 有利于解决并联式混合动力装载机驱动模式切换过程中合成扭矩输出不稳定的问题;文献[5]以ZL50型并联式混合动力装载机为研究对象, 提出了以油门开度、车速、作业载荷系数为控制参数的自动变速控制原理, 提高了车辆的动力性和系统效率。
针对柴电机组与超级电容器组成混合动力地下铲运机, 设计以主控制器为主, 传统线束和CAN总线通信相结合的电控系统, 实现主控制器对整车各子系统运行状态的采集和控制指令的发送, 实现作为混合动力驱动系统控制策略载体的主控制器对整车的控制。并搭建混合动力驱动系统试验台架, 对混合动力驱动系统联合调试。
2、电控系统设计
2.1、控制系统原理
电控系统是混合动力铲运机整车的重要组成部分。它负责通过传感器对整车各系统的运行状态进行采集, 并通过对继电器、电磁阀等实现对执行机构的控制[6-7]。同时还是人际交互的平台, 驾驶员通过操作机构包括按钮、手柄、踏板等实现对整车的操控, 并通过指示灯、显示屏等了解整车的运行状态。还要负责完成驱动系统主控制器和各控制单元之间的通信, 如图1所示。
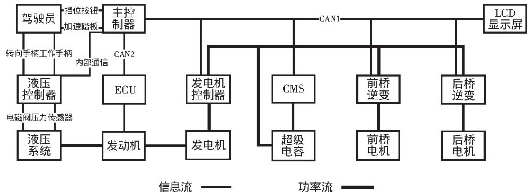
图1 混合动力地下铲运机电控系统结构图
主控制器和液压控制器分别通过控制器输入管脚采集驾驶员的驾驶和工作意图。液压控制器根据驾驶员的工作意图驱动电磁阀控制液压系统, 并通过液压传感器采集液压系统状态[8]。主控制器通过和液压控制器的内部通信接收液压系统的上行数据, 并向液压系统发送控制指令, 通过CAN1主动力回路实现主控制器和各功率部件控制单元的通信, CAN2的J1939专用回路完成主控制器和发动机通信。电控系统中各功率部件的控制单元包括发动机ECU、发电机控制器、超级电容管理系统、前桥逆变器和后桥逆变器为部件供应商设计开发。主控制器按照与供应商制定好的CAN总线通信协议规定的报文格式, 向各控制单元发送指令并接收返回数据, 完成对各功率部件的控制[9-10]。因此电控系统设计的重点在于主控制器和液压控制器的设计开发。
2.2、主控制器
主控制器是驱动系统控制策略的载体, 通过IO端口和通信端口采集整车运行状态以及驾驶员驾驶意图[11], 完成与整车各子控制单元间信息交互和数据分析, 机构原理, 如图2所示。根据采集到的数据按照控制策略对驱动系统进行控制和管理。主控制器选型要求其集成有CANopen协议及足够的IO接口。
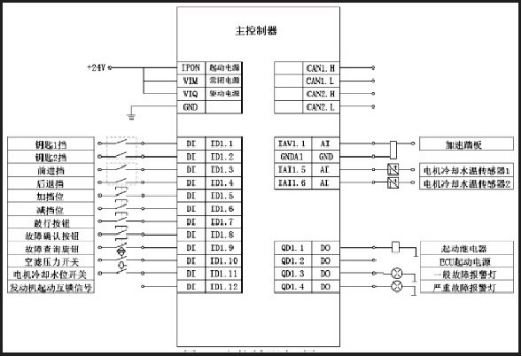
图2 主控制器原理图
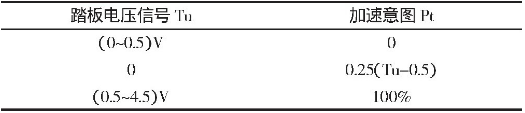
驾驶员的加速意图是通过油门踏板踩踏的深度由浅到深控制 (0~5) V的电压模拟量输入信号发送给主控制器的模拟量采集管脚。踩踏深度代表驾驶员的指令功率和指令转矩。选取 (0.5~4.5) V电压模拟量输入代表 (0~100) %的驾驶员指令功率。以0.5V作为起点是为了防止车辆颠簸和其它干扰导致的错误信号输入;以4.5V作为终点, 是为了方便驾驶员以最大功率行车这一常用驾驶操作。驾驶员加速意图标定公式, 如表1所示。
表1 驾驶员加速意图标定公式
2.3、CAN通信网络系统设计
混合动力铲运机整车的电控系统采用常规线束信号和CAN网络信号并用的方式实现整车的通信。其中CAN通讯网络为以主控制器为主的二路CAN网络拓扑。每路各个节点之间的CANH和CANL均采用带屏蔽的双绞线连接[12]。每路CAN网络两端并联120Ω的终端电阻, 提高数据传输的抗干扰性和可靠性。其中CAN1网络为主动力回路, 包括发电机控制器, 超级电容管理系统, 前后桥逆变器, LCD显示屏, 各子控制单元接收主控制器的控制指令并传输上行数据。CAN2网络为J1939通信网络, 实现主控制器和柴油机ECU的通信, 传输主控制器对柴油机的控制指令和柴油机运行状态参数[13]。主控制器与各子单元之间进行双向的数据传输, 只有LCD显示屏仅接收相关数据。混合动力铲运机CAN总线网络结构图, 如图3所示。
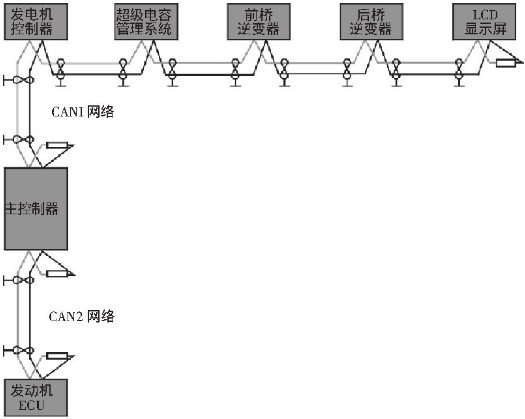
图3 混合动力铲运机CAN总线网络结构图
CAN1主动力回路主要包括驱动系统各部件的控制单元, 包括超级电容管理系统、发电机控制器、前桥电机逆变器、后桥电机逆变器。将各控制单元并联在CAN1总线网络上, 主控制器参照与各部件供应商制定的以CAN2.0B为基础的总线通信协议, 按照规定的报文格式给各部件发送控制指令, 并接收各部件发送的返回值[14]。
主控制器通过CAN2通信网络给发动机ECU发送指令控制发动机的目标转速[15]。并且发动机ECU通过CAN2通信网络实时的给主控制器发送发动机状态的返回值, 包括发动机实际转速, 实际扭矩百分比, 当前转速负荷百分比, 油箱液位, 发动机冷却水温, 燃油温度, 机油温度, 发动机工作小时等。
3、制系统台架试验与调试
混合动力控制系统试验台结构, 如图4所示。
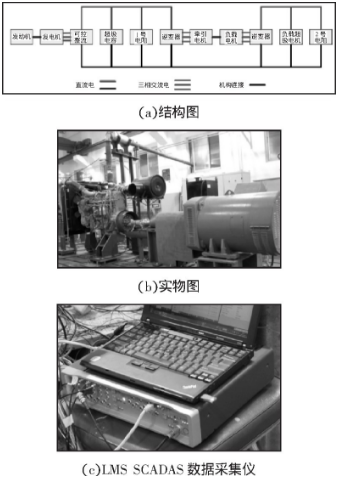
图4 混合动力地下铲运机试验台架
3.1、最大发电功率大于牵引功率
发电机实时最大发电功率大于驱动系统需求功率, 且超级电容器电压未达到上限, 此时发电机在给牵引电机提供电能的同时为超级电容器充电。将超级电容器电压调整至480V, 限制发电机最大发电功率为80k W, 调整对拖电机工作在工作点进行试验, 使系统处于最大发电功率大于牵引功率, 且超级电容器电量未满。测试混合动力系统在超级电容电量未满时柴电机组为超级电容器和牵引电机同时供电工作模式, 以及在母线电压接近系统工作电压上限时的发电功率跟随牵引功率工作模式。试验结果, 如图5所示。
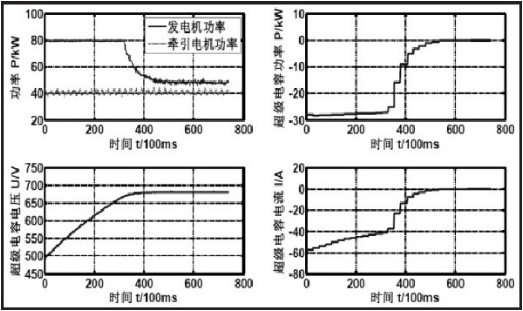
图5 最大发电功率大于牵引功率工况试验
在进入限功率电压值以前, 发电机按最大发电功率80k W发电, 为牵引电机供电并为电容充电, 超级电容以28k W充电功率充电, 牵引电机工作在指令工作点, 牵引功率为40k W。此时系统为柴电机组为超级电容器和牵引电机同时供电工作模式。在超级电容电压达到670V以后, 虽然发电机指令功率不变, 但发电功率随电压升高逐渐下降, 超级电容器的充电功率和电流也随之逐渐下降。发电功率被限至48k W, 跟随牵引电机的牵引功率, 超级电容器的充电功率和电流逐渐变为0, 母线电压保持在680V, 牵引电机始终工作在指令工作点, 牵引功率保持40k W不变。此时混合动力系统为柴电机组单独驱动牵引电机工作模式。
由试验结果可知, 混合动力系统在发动机剩余功率, 即发电机实时最大发电功率大于牵引电机牵引功率, 且超级电容器电量未满时, 发电机能够按最大发电功率发电, 混合动力系统可以以柴电机组为超级电容器和牵引电机同时供电工作模式工作, 超级电容器利用柴电机组供给牵引电机的牵引功率后的剩余发电功率进行充电储备电能。当母线电压接近系统工作电压范围上限时, 柴电机组能够跟随牵引电机的取用功率, 保持母线电压不过压, 驱动系统工作在柴电机组单独驱动牵引电机工作模式。
3.2、最大发电功率小于牵引功率
发电机实时最大发电功率小于驱动系统需求功率, 且超级电容器有电, 电压在系统工作电压下限以上时, 超级电容放电进行功率补偿, 发电机和超级电容器共同为牵引电机提供电能。当超级电容器电压接近系统工作电压范围下限时, 牵引电机开始限功率工作, 牵引功率跟随发电机的发电功率, 最大限度满足行驶负载功率需求的同时, 保持母线电压, 防止出现系统母线欠压故障。调整超级电容器电压至680V, 限制发电机最大发电功率为40k W, 调整对拖电机工作在工作点进行试验, 使系统处于牵引功率大于发电机最大发电功率, 且超级电容器电压较高电量充足。测试超级电容有电时柴电机组和超级电容器共同驱动牵引电机工作模式, 以及在母线电压接近系统工作电压下限时的牵引功率跟随发电功率工作模式。试验结果, 如图6所示。
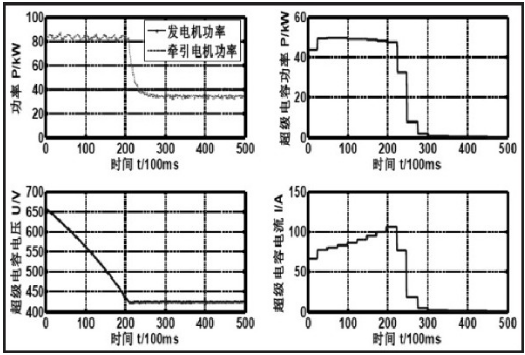
图6 最大发电功率小于牵引功率工况试验
在进入限功率电压值以前, 牵引电机工作在指定工作点, 牵引功率为83k W, 发电机按最大发电功率40k W发电, 超级电容器以48k W功率放电补偿发电功率和牵引功率差值。此时系统为柴电机组和超级电容器共同驱动牵引电机工作模式。超级电容电压下降至425V开始, 发电机始终按照最大发电功率40k W发电, 牵引功率随电压下降逐渐下降, 超级电容器进行功率补偿的放电功率和电流也随之逐渐下降, 最后系统牵引功率为34k W跟随发电机的发电功率, 超级电容器的放电功率和电流都变为0, 母线电压保持在424V, 此时为柴电机组单独驱动牵引电机工作模式。
由试验结果可知, 混合动力系统在牵引电机功率大于发电机的最大发电功率, 且超级电容器有电时, 可以以柴电机组和超级电容器共同驱动牵引电机工作模式工作, 发电机按最大发电功率发电, 超级电容器放电进行功率补偿驱动牵引电机。当母线电压接近系统工作电压范围下限时, 牵引电机随母线电压下降逐渐减小输出功率, 最后牵引电机跟随发电机的发电功率, 保持母线电压不欠压, 驱动系统工作在柴电机组单独驱动牵引电机工作模式。
4、结论
针对混合动力铲运机的电控系统设计, 设计以主控制器为主, 传统线束和CAN总线通信相结合的电控系统, 结果可知:
(1) 主动力回路的CAN1网络, 实现主控制器和发电机控制器, 超级电容管理系统, 前电机逆变, 后电机逆变和LCD显示屏的通信, 以及CAN2网络实现了主控制器和发动机ECU的通信。
(2) 混合动力铲运机以传统线束和CAN通信相结合的方式, 以主控制器为核心, 包括液压系统, 主动力回路、发动机ECU等控制单元和其它系统的整车电控系统, 实现了主控制器与整车各部分的通信, 为主控制器对驱动系统的控制提供了有效的平台。
(3) 在试验台架条件下, 对混合动力系统各相关部件包括发电机和超级电容性能进行了测试和分析, 从而验证了地下混合动力车辆电控系统设计的合理性和准确性。
参考文献
[1]易纲, 常思勤, 张庆永.液驱混合动力车辆控制系统的开发[J].汽车工程, 2007, 29 (10) :876-879. (Yi Gang, Chang Si-qin, Zhang Qing-yong.Development of control system for hydraulic hybrid vehicle[J].Automotive Engineering, 2007, 29 (10) :876-879.)
[2]Jeon E C, Je T J, Lee E S.Optimization of hybrid LED package system for energy saving based on micro machining technology and taguchi method[J].International Journal of Precision Engineering&Manufacturing, 2013, 14 (6) :1113-1116.
[3]Tseng S Y, Wang H Y, Chen C C.PV power system using hybrid converter for LED indictor applications[J].Energy Conversion&Management, 2013, 75 (11) :761-772.
[4]Osigbemeh M, Onuu M, Asaolu O.Design and development of an improved traffic light control system using hybrid lighting system[J].Journal of Traffic&Transportation Engineering, 2016, 68 (6) :125-131.
[5]Chen J.Analysis and Design of LED Constant Current Source Based on Current Mode Control[J].Semiconductor Optoelectronics, 2014, 69 (7) :1123-1132.
[6]彭朝亮, 冯国胜, 袁新华.混合动力汽车电机控制器硬件设计与CAN通信[J].农业装备与车辆工程, 2017, 55 (3) :12-17. (Peng Chao-liang, Feng Guo-sheng, Yuan Xin-hua.Hardware Design of Motor Controller and Development of CAN Bus System for Hybrid Electric Vehicle[J].Agricultural Equipment&Vehicle Engineering, 2017, 55 (3) :12-17.)
[7]甘海云, 张俊智, 卢青春.轿车混合动力总成控制系统的开发与试验研究[J].机械工程学报, 2004, 40 (8) :91-95.Gan Hai-yun, Zhang Jun-zhi, Lu Qing-chun.Development and experiment research of hybrid electric vehicle’s powertrain control system[J].Chinese Journal of Mechanical Engineering, 2004, 40 (8) :91-95.
[8]宋志峰.混合动力地下铲运机驱动系统控制设计[J].机械设计与制造, 2016 (12) :139-142. (Song Zhi-feng.Design of the Control of Hybrid Underground LHD Drive System[J].Machinery Design&Manufacture, 2016 (12) :139-142.)
[9]Li R, Jia M W, He W B.Virtual-Prototyping Oriented Key Research and Development System of Load Haul Dump[J].Advanced Materials Research, 2011, 317-319:516-522.
[10]姚竹亭, 吴立新, 潘宏侠.基于CAN总线的车辆控制系统设计与实现[J].火力与指挥控制, 2009, 34 (6) :138-140. (Yao Zhu-ting, Wu Li-xin, Pan Hong-xia.The Design and Realization on the CAN Bus of Vehicle Control System[J].Fire Control&Command Control, 2009, 34 (6) :138-140.)
[11]赵丁选, 李天宇, 康怀亮.混合动力工程车辆自动变速技术[J].吉林大学学报:工学版, 2014, 44 (2) :358-363. (Zhao Ding-xuan, Li Tian-ning, Kang Huai-liang.Automatic shift technology of hybrid power engineering vehicle[J].Journal of Jilin University:Engineering and Technology Edition, 2014, 44 (2) :358-363.)